Vehicle Standard (Australian Design Rule 72/01 – Dynamic Side Impact Occupant Protection) 2025
I, CATHERINE KING, Minister for Infrastructure, Transport, Regional Development and Local Government, determine this national road vehicle standard under section 12 of the Road Vehicle Standards Act 2018.
Dated 13 January 2025
[SIGNED]
Catherine King
Minister for Infrastructure, Transport, Regional Development and Local Government
CONTENTS
1. legislative provisions
2. FUNCTION
3. APPLICABILITY
4. DEFINITIONS
5. REQUIREMENTS
6. EXEMPTIONS AND ALTERNATIVE PROCEDURES
7. ALTERNATIVE STANDARDS
APPENDIX A
- legislative provisions
- Name of Standard
- This standard is the Vehicle Standard (Australian Design Rule 72/01 – Dynamic Side Impact Occupant Protection) 2025.
- This standard may also be cited as the Australian Design Rule 72/01 – Dynamic Side Impact Occupant Protection, the Australian Design Rule 72/01, or ADR 72/01.
- Authority
- This standard is made under section 12 of the Road Vehicle Standards Act 2018.
- Commencement
- This standard commences on the day after it is registered.
- FUNCTION
- The function of this standard is to reduce the risk of serious and fatal injury of vehicle occupants in a lateral crash by limiting the forces, accelerations and deflections measured by anthropomorphic test devices in a dynamic side impact crash test and by other means (including measures provided for protecting the occupants from direct contact with high voltage live parts).
- APPLICABILITY
- This standard applies to category MA, MB, MC and NA vehicles, where the “R” point of the lowest seat is not more than 700 mm from ground level when the vehicle is in the condition corresponding to the “reference mass” defined in paragraph 2.10 of Appendix A, from the dates set out in clauses 3.1.1 to 3.1.2 and the table under clause 3.3 below.
- 1 November 2026 for all new model vehicles.
- 1 November 2028 for all vehicles.
- For the purposes of clause 3.1.1 above, a “new model” is a vehicle model first produced with a ‘Date of Manufacture’ on or after the date prescribed in that clause.
- Applicability Table
Vehicle Category | ADR Category Code | UN Category Code* | Manufactured on or After | Acceptable Prior Rules |
Moped 2 wheels | LA | L1 | Not Applicable | |
Moped 3 wheels | LB | L2 | Not Applicable | |
Motor cycle | LC | L3 | Not Applicable | |
Motor cycle and sidecar | LD | L4 | Not Applicable | |
Motor tricycle | LE | L5 | | |
| LEM | | Not Applicable | |
| LEP | | Not Applicable | |
| LEG | | Not Applicable | |
Passenger car | MA | M1 | 1 November 2026** | Nil |
Forward-control passenger vehicle | MB | M1 | 1 November 2026** | Nil |
Off-road passenger vehicle | MC | M1 | 1 November 2026** | Nil |
Light omnibus | MD | M2 | | |
| up to 3.5 tonnes ‘GVM’ and up to 12 seats | MD1 | | Not Applicable | |
| up to 3.5 tonnes ‘GVM’ and more than 12 seats | MD2 | | Not Applicable | |
| over 3.5 tonnes and up to 4.5 tonnes ‘GVM’ | MD3 | | Not Applicable | |
| over 4.5 tonnes and up to 5 tonnes ‘GVM’ | MD4 | | Not Applicable | |
Heavy omnibus | ME | M3 | Not Applicable | |
Light goods vehicle | NA | N1 | 1 November 2026* | Nil |
Medium goods vehicle | NB | N2 | | |
| over 3.5 tonnes up to 4.5 tonnes ‘GVM’ | NB1 | | Not Applicable | |
| over 4.5 tonnes up to 12 tonnes ‘GVM’ | NB2 | | Not Applicable | |
Heavy goods vehicle | NC | N3 | Not Applicable | |
Very light trailer | TA | O1 | Not Applicable | |
Light trailer | TB | O2 | Not Applicable | |
Medium trailer | TC | O3 | Not Applicable | |
Heavy trailer | TD | O4 | Not Applicable | |
* The category code may also be in the format L1, L2, L3 etc.
** Refer clauses 3.1 to 3.2.
- DEFINITIONS
- For vehicle categories, definitions and meanings used in this standard, refer to:
- Vehicle Standard (Australian Design Rule – Definitions and Vehicle Categories) 2005; and
- Definitions in Appendix A of this standard.
- REQUIREMENTS
- Vehicles must comply with the requirements of:
- Appendix A, as varied by clause 6 (Exemptions and Alternative Procedures); or
- an alternative standard under clause 7.
- EXEMPTIONS AND ALTERNATIVE PROCEDURES
- Compliance with the following parts, paragraphs and annexes of Appendix A is not required for the purposes of this standard:
Paragraph 3 Application for approval
Paragraph 4 Approval
Paragraph 7 Conformity of production
Paragraph 8 Penalties for non-conformity of production
Paragraph 9 Production definitively discontinued
Paragraph 10 Names and addresses of Technical Services responsible for conducting approval tests, and of Type Approval Authorities
Paragraph 11 Transitional provisions
Annexes
Annex 1 Communication
Annex 2 Arrangements of the approval mark
- Omit paragraphs 5.1.1 to 5.1.1.2 of Appendix A, and substitute the requirements specified in clauses 6.2.1 to 6.2.2 below.
- The test in accordance with Annex 4 to Appendix A shall be carried out on the driver’s side except where the side structures, front‑row seats or the type of protective systems on each side of the vehicle sufficiently differ in ways that make the side opposite the driver’s side the least favourable (i.e. worst case) side for performance.
- The test in accordance with Annex 4 to Appendix A shall be carried out on the side opposite the driver’s side in cases where this is the least favourable (i.e. worst case) side for performance.
- Paragraph 5.1.2 of Appendix A shall not apply.
- In paragraph 5.2 of Appendix A, omit “Technical Service”, substitute “Testing Facility”.
- In paragraph 5.3.1.1.1 of Appendix A, omit “to the satisfaction of the Technical Service”.
- In paragraph 5.3.2.2.1 of Appendix A, omit “to the satisfaction of the Technical Service”.
- In paragraph 5.11.2.1 of Annex 4 to Appendix A, omit “Technical Service”, substitute “Testing Facility”.
- In paragraph 6.2 of Annex 4 to Appendix A, omit “Belts should be of an approved type, conforming to Regulation No. 16 or to other equivalent requirements and mounted on anchorages conforming to Regulation No. 14 or to other equivalent requirements”, substitute “Belts shall be of a type conforming to the Australian Design Rule 4/… – Seatbelts, and mounted on anchorages conforming to the Australian Design Rule 5/…1 – Anchorages for Seatbelts”.
- In Appendix A, ISO 6487:2015 may be used and complied with as an alternative to ISO 6487:2000 or ISO 6487:1987 (wherever either of these earlier versions are specified).
- If there is a conflict between this clause 6 above and Appendix A below, this clause 6 takes precedence.
- ALTERNATIVE STANDARDS
- The technical requirements of the United Nations Regulation No. 95 – UNIFORM PROVISIONS CONCERNING THE APPROVAL OF VEHICLES WITH REGARD TO THE PROTECTION OF THE OCCUPANTS IN THE EVENT OF A LATERAL COLLISION, incorporating the 05 series of amendments.
- The technical requirements of the United Nations Regulation No. 95 – UNIFORM PROVISIONS CONCERNING THE APPROVAL OF VEHICLES WITH REGARD TO THE PROTECTION OF THE OCCUPANTS IN THE EVENT OF A LATERAL COLLISION, incorporating the 04 series of amendments.
- The technical requirements of the United Nations Regulation No. 95 – UNIFORM PROVISIONS CONCERNING THE APPROVAL OF VEHICLES WITH REGARD TO THE PROTECTION OF THE OCCUPANTS IN THE EVENT OF A LATERAL COLLISION, incorporating the 03 series of amendments.
APPENDIX A
Agreement
Concerning the Adoption of Harmonized Technical United Nations Regulations for Wheeled Vehicles, Equipment and Parts which can be Fitted and/or be Used on Wheeled Vehicles and the Conditions for Reciprocal Recognition of Approvals Granted on the Basis of these United Nations Regulations
(Revision 3, including the amendments which entered into force on 14 September 2017)
Addendum 94: UN Regulation No. 95
Incorporating by the Department of Infrastructure, Transport, Regional Development, Communications and the Arts, all valid text up to:
05 series of amendments – Date of entry into force: 9 June 2021
Supplement 1 to the 05 series of amendments – Date of entry into force: 7 January 2022
Supplement 2 to the 05 series of amendments – Date of entry into force: 22 June 2022
Supplement 3 to the 05 series of amendments – Date of entry into force: 5 January 2024
Uniform provisions concerning the approval of vehicles with regard to the protection of the occupants in the event of a lateral collision
Regulation No. 95
Uniform provisions concerning the approval of vehicles with regard to the protection of the occupants in the event of a lateral collision
Contents
Page
Regulation
1. Scope............................................................. 10
2. Definitions.......................................................... 10
3. Application for approval................................................. 14
4. Approval........................................................... 15
5. Specifications and tests.................................................. 16
6. Modification of the vehicle type............................................ 21
7. Conformity of production................................................ 22
8. Penalties for non-conformity of production..................................... 23
9. Production definitively discontinued......................................... 23
10. Names and addresses of Technical Services responsible for conducting approval tests,
and of Type Approval Authorities........................................... 23
11. Transitional provisions.................................................. 23
Annexes
1 Communication....................................................... 25
2 Arrangements of the approval mark.......................................... 27
3 Procedure for determining the "H" point and the actual torso angle for seating positions in motor vehicles 28
Appendix 1 - Description of the three dimensional "H" point machine (3-D H machine)1....... 28
Appendix 2 - Three‑dimensional reference system1......................... 28
Appendix 3 - Reference data concerning seating positions1.......................... 28
4 Collision test procedure.................................................. 29
Appendix 1 - Determination of performance data................................. 34
Appendix 2 - The procedure for calculating the viscous criterion for EUROSID 1........... 35
5 Mobile deformable barrier characteristics...................................... 36
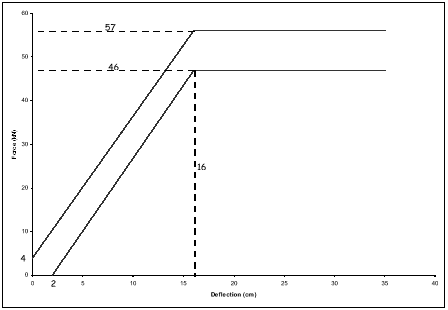
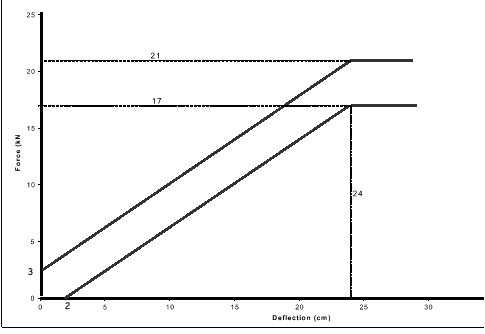
Appendix 1 - Force-deflection curves for static tests............................... 49
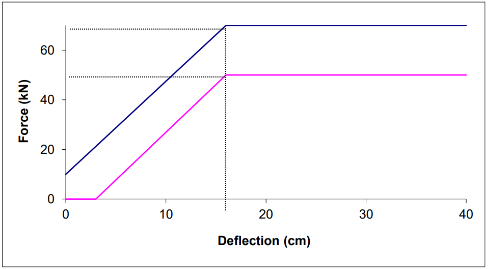
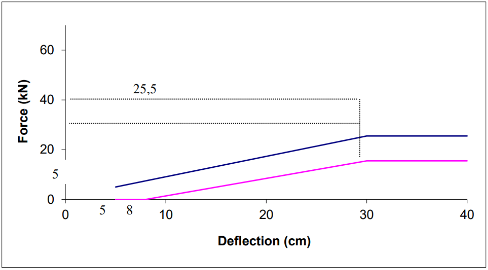
Appendix 2 - Force-deflection curves for dynamic tests............................. 51
6 Technical description of the side impact dummy................................. 54
7 Installation of the side impact dummy........................................ 72
8 Partial test.......................................................... 74
9 Test procedures for the vehicles equipped with electric power train..................... 76
1. Scope
This Regulation applies to vehicles of category M1 with a maximum permissible mass not exceeding 3,500 kg, vehicles of category M1 with a maximum permissible mass exceeding 3,500 kg where the "R" point of the lowest seat is not more than 700 mm from ground level when the vehicle is in the condition corresponding to the reference mass defined in paragraph 2.10. of this Regulation, and to vehicles of category N1.[2].
2. Definitions
For the purposes of this Regulation:
2.1. "Approval of a vehicle" means the approval of a vehicle type with regard to the behaviour of the structure of the passenger compartment in a lateral collision.
2.2. "Vehicle type" means a category of power-driven vehicles which do not differ in such essential respects as:
2.2.1. The length, width and ground clearance of the vehicle, in so far as they have a negative effect on the performance prescribed in this Regulation;
2.2.2. The structure, dimensions, lines and materials of the side walls of the passenger compartment in so far as they have a negative effect on the performance prescribed in this Regulation;
2.2.3. The lines and inside dimensions of the passenger compartment and the type of protective systems, in so far as they have a negative effect on the performance prescribed in this Regulation;
2.2.4. The sitting of the engine (front, rear or centre) and the orientation (transversal or longitudinal) of the engine, in so far as they have a negative effect on the result of the impact test of this Regulation;
2.2.5. The unladen mass, in so far as there is a negative effect on the performance prescribed in this Regulation;
2.2.6. The optional arrangements or interior fittings in so far as they have a negative effect on the performance prescribed in this Regulation;
2.2.7. The type of front seat(s) and position of the "R" point in so far as they have a negative effect on the performance prescribed in this Regulation;
2.2.8. The locations of the REESS, in so far as they have a negative effect on the result of the impact test prescribed in this Regulation.
2.3. "Passenger compartment" means the space for occupant accommodation, bounded by the roof, floor, side walls, doors, outside glazing and front bulkhead and the plane of the rear compartment bulkhead or the plane of the rear-seat back support.
2.3.1. "Passenger compartment with regard to occupant protection" means the space for occupant accommodation, bounded by the roof, floor, side walls, doors, outside glazing and front bulkhead and the plane of the rear compartment bulkhead or the plane of the rear-seat back support.
2.3.2. "Passenger compartment for electric safety assessment" means the space for occupant accommodation, bounded by the roof, floor, side walls, doors, outside glazing, front bulkhead and rear bulkhead, or rear gate, as well as by the electrical protection barriers and enclosures provided for protecting the occupants from direct contact with high voltage live parts.
2.4. "R point" or "seating reference point" means the reference point specified by the vehicle manufacturer which:
2.4.1. Has co-ordinates determined in relation to the vehicle structure;
2.4.2. Corresponds to the theoretical position of the point of torso/thighs rotation (H point) for the lowest and most rearward normal driving position or position of use given by the vehicle manufacturer for each seating position specified by him.
2.5. "H point" is as established by Annex 3 to this Regulation.
2.6. "Capacity of the fuel tank" means the fuel-tank capacity as specified by the manufacturer of the vehicle.
2.7. "Transverse plane" means a vertical plane perpendicular to the median longitudinal vertical plane of the vehicle.
2.8. "Protective system" means devices intended to restrain and/or protect the occupants.
2.9. "Type of protective system" means a category of protective devices which do not differ in such essential respects as their:
Technology;
Geometry;
Constituent materials.
2.10. "Reference mass" means the unladen mass of the vehicle increased by a mass of 100 kg (that is the mass of the side impact dummy and its instrumentation).
2.11. "Unladen mass" means the mass of the vehicle in running order without driver, passengers or load, but with the fuel tank filled to 90 per cent of its capacity and the usual set of tools and spare wheel on board, where applicable.
2.12. "Mobile deformable barrier" means the apparatus with which the test vehicle is impacted. It consists of a trolley and an impactor.
2.13. "Impactor" means a crushable section mounted on the front of mobile deformable barrier.
2.14. "Trolley" means a wheeled frame free to travel along its longitudinal axis at the point of impact. Its front supports the impactor.
2.15. "High voltage" means the classification of an electric component or circuit, if its working voltage is > 60 V and ≤ 1,500 V direct current (DC) or > 30 V and ≤ 1,000 V alternating current (AC) root - mean - square (rms).
2.16. "Rechargeable Electrical Energy Storage System (REESS)" means the rechargeable energy storage system that provides electric energy for electrical propulsion.
A battery whose primary use is to supply power for starting the engine and/or lighting and/or other vehicle auxiliaries’ systems is not considered as a REESS.
The REESS may include the necessary systems for physical support, thermal management, electronic controls and casing.
2.17. "Electrical protection barrier" means the part providing protection against direct contact to the high voltage live parts.
2.18. "Electric power train" means the electrical circuit which includes the traction motor(s), and may also include the REESS, the electrical energy conversion system, the electronic converters, the associated wiring harness and connectors, and the coupling system for charging the REESS.
2.19. "Live parts" means conductive part(s) intended to be electrically energized under normal operating conditions.
2.20. "Exposed conductive part" means the conductive part which can be touched under the provisions of the protection degree IPXXB and which is not normally energized, but which can become electrically energized under isolation failure conditions. This includes parts under a cover that can be removed without using tools.
2.21. "Direct contact" means the contact of persons with high voltage live parts.
2.22. "Indirect contact" means the contact of persons with exposed conductive parts.
2.23. "Protection degree IPXXB" means protection from contact with high voltage live parts provided by either an electrical protection barrier or an enclosure and tested using a Jointed Test Finger (degree IPXXB) as described in paragraph 4. of Annex 9.
2.24. "Working voltage" means the highest value of an electrical circuit voltage root-mean-square (rms), specified by the manufacturer, which may occur between any conductive parts in open circuit conditions or under normal operating conditions. If the electrical circuit is divided by galvanic isolation, the working voltage is defined for each divided circuit, respectively.
2.25. "Coupling system for charging the Rechargeable Electrical Energy Storage System (REESS)" means the electrical circuit used for charging the REESS from an external electrical power supply including the vehicle inlet.
2.26. "Electrical chassis" means a set made of conductive parts electrically linked together, whose electrical potential is taken as reference.
2.27. "Electrical circuit" means an assembly of connected live parts which is designed to be electrically energized in normal operation.
2.28. "Electrical energy conversion system" means a system (e.g. fuel cell) that generates and provides electrical energy for electrical propulsion.
2.29. "Electronic converter" means a device capable of controlling and/or converting electrical power for electrical propulsion.
2.30. "Enclosure" means the part enclosing the internal units and providing protection against any direct contact.
2.31. "High voltage bus" means the electrical circuit, including the coupling system for charging the REESS, that operates on a high voltage.
Where electric circuits are galvanically connected to each other and fulfil the specific voltage condition, only the components or parts of the electric circuit that operate on high voltage are classified as a high voltage bus.
2.32. "Solid insulator" means the insulating coating of wiring harnesses, provided in order to cover and prevent the high voltage live parts from any direct contact.
2.33. "Automatic disconnect" means a device that when triggered, galvanically separates the electrical energy sources from the rest of the high voltage circuit of the electric power train.
2.34. "Open type traction battery" means a type of battery requiring filling with liquid and generating hydrogen gas that is released to the atmosphere.
2.35. "Automatically activated door locking system" means a system that locks the doors automatically at a pre-set speed or under any other condition as defined by the manufacturer.
2.36. "Latched" means any coupling condition of the door latch system, where the latch is in a fully latched position, a secondary latched position, or in between a fully latched position and a secondary latched position.
2.37. "Latch" is a device employed to maintain the door in a closed position relative to the vehicle body with provisions for deliberate release (or operation).
2.38. "Fully latched position" is the coupling condition of the latch that retains the door in a completely closed position.
2.39. "Secondary latched position" refers to the coupling condition of the latch that retains the door in a partially closed position.
2.40. "Displacement system" means a device by which the seat or one of its parts can be displaced and/or rotated, without a fixed intermediate position, to permit easy access of occupants to and from the space behind the seat concerned.
2.41. "Aqueous electrolyte" means an electrolyte based on water solvent for the compounds (e.g. acids, bases) providing conducting ions after its dissociation.
2.42. "Electrolyte leakage" means the escape of electrolyte from the REESS in the form of liquid.
2.43. "Non-aqueous electrolyte" means an electrolyte not based on water as the solvent.
2.44. "Normal operating conditions" includes operating modes and conditions that can reasonably be encountered during typical operation of the vehicle including driving at legally posted speeds, parking and standing in traffic, as well as, charging using chargers that are compatible with the specific charging ports installed on the vehicle. It does not include, conditions where the vehicle is damaged, either by a crash, road debris or vandalization, subjected to fire or water submersion, or in a state where service and or maintenance is needed or being performed.
2.45. "Specific voltage condition" means the condition that the maximum voltage of a galvanically connected electric circuit between a DC live part and any other live part (DC or AC) is ≤ 30 V AC (rms) and ≤ 60 V DC.
Note 1: When a DC live part of such an electric circuit is connected to electrical chassis and the specific voltage condition applies, the maximum voltage between any live part and the electrical chassis is ≤ 30 V AC (rms) and ≤ 60 V DC.
Note 2: For pulsating DC voltages (alternating voltages without change of polarity) the DC threshold shall be applied.
2.46. "State of Charge (SOC)" means the available electrical charge in a REESS expressed as a percentage of its rated capacity.
2.47. "Fire" means the emission of flames from the vehicle. Sparks and arcing shall not be considered as flames.
2.48. "Explosion" means the sudden release of energy sufficient to cause pressure waves and/or projectiles that may cause structural and/or physical damage to the surrounding of the vehicle
3. Application for approval
3.1. The application for approval of a vehicle type with regard to the protection of the occupants in the event of a lateral collision shall be submitted by the vehicle manufacturer or by his duly accredited representative.
3.2. It shall be accompanied by the under mentioned documents in triplicate and the following particulars:
3.2.1. A detailed description of the vehicle type with respect to its structure, dimensions, lines and constitutent materials;
3.2.2. Photographs and/or diagrams and drawings of the vehicle showing the vehicle type in front, side and rear elevation and design details of the lateral part of the structure;
3.2.3. Particulars of the vehicle’s mass as defined by paragraph 2.11. of this Regulation;
3.2.4. The lines and inside dimensions of the passenger compartment;
3.2.5. A description of the relevant side interior fittings and protective systems installed in the vehicle;
3.2.6. A general description of the electrical power source type, location and the electrical power train (e.g. hybrid, electric).
3.3. The applicant for approval shall be entitled to present any data and results of tests carried out which make it possible to establish that compliance with the requirements can be achieved on prototype vehicles with a sufficient degree of accuracy.
3.4. A vehicle which is representative of the type to be approved shall be submitted to the Technical Service responsible for conducting the approval tests.
3.4.1. A vehicle not comprising all the components proper to the type may be accepted for tests provided that it can be shown that the absence of the components omitted has no detrimental effect on the performance prescribed in the requirements of this Regulation.
3.4.2. It shall be the responsibility of the applicant for approval to show that the application of paragraph 3.4.1 above is in compliance with the requirements of this Regulation.
4. Approval
4.1. If the vehicle type submitted for approval pursuant to this Regulation meets the requirements of paragraph 5. below, approval of that vehicle type shall be granted.
4.2. An approval number shall be assigned to each type approved in accordance with Schedule 4 of the Agreement (E/ECE/TRANS/505/Rev.3).
4.3. Notice of approval or of refusal of approval of a vehicle type pursuant to this Regulation shall be communicated by the Parties to the Agreement which apply this Regulation by means of a form conforming to the model in Annex 1 to this Regulation.
4.4. Notice of approval or of extension or of refusal of approval of a vehicle type pursuant to this Regulation shall be communicated by the Parties to the Agreement applying this Regulation by means of a form conforming to the model in Annex 1 to this Regulation and photographs and/or diagrams and drawings supplied by the applicant for approval, in a format not exceeding A4 (210 x 297 mm) or folded to that format and on an appropriate scale.
4.5. There shall be affixed to every vehicle conforming to a vehicle type approved under this Regulation, conspicuously and in a readily accessible place specified on the approval form, an international approval mark consisting of:
4.5.1. A circle surrounding the letter "E" followed by the distinguishing number of the country which has granted approval;[3]
4.5.2. The number of this Regulation, followed by the letter "R", a dash and the approval number, to the right of the circle prescribed in paragraph 4.5.1. above.
4.6. If the vehicle conforms to a vehicle type approved, under one or more other Regulations annexed to the Agreement, in the country which has granted approval under this Regulation, the symbol prescribed in paragraph 4.5.1. above need not be repeated; in this case the Regulation and approval numbers and the additional symbols of all the Regulations under which approval has been granted in the country which has granted approval under this Regulation shall be placed in vertical columns to the right of the symbol prescribed in paragraph 4.5.1. above.
4.7. The approval mark shall be clearly legible and shall be indelible.
4.8. Annex 2 to this Regulation gives examples of the arrangements of approval marks.
4.9. Annex 2 to this Regulation gives examples of approval marks.
5. Specifications and tests
5.1. The vehicle shall undergo a test in accordance with Annex 4 to this Regulation.
5.1.1. The test will be carried out on the driver’s side unless asymmetric side structures, if any, are so different as to affect the performance in a side impact. In that case either of the alternatives in paragraph 5.1.1.1. or 5.1.1.2. below may be used by agreement between the manufacturer and Type Approval Authority.
5.1.1.1. The manufacturer will provide the authority responsible for approval with information regarding the compatibility of performances in comparison with the driver’s side when the test is being carried out on that side.
5.1.1.2. The Type Approval Authority, if concerned as to the construction of the vehicle, will decide to have the test performed on the side opposite the driver, this being considered the least favourable.
5.1.2. The Technical Service, after consultation with the manufacturer, may require the test to be carried out with the seat in a position other than the one indicated in paragraph 5.5.1. of Annex 4. This position shall be indicated in the test report.[4]
5.1.3. The result of this test shall be considered satisfactory if the conditions set out in paragraphs 5.2. and 5.3. below are satisfied.
5.2. Performance criteria
Additionally, vehicles equipped with electric power train shall meet the requirements of paragraph 5.3.7. below. This can be met by a separate impact test at the request of the manufacturer and after validation by the Technical Service, provided that the electrical components do not influence the occupant protection performance of the vehicle type as defined in paragraphs 5.2.1. to 5.3.5. of this Regulation. In case of this condition the requirements of paragraph 5.3.7. shall be checked in accordance with the methods set out in Annex 4 to this Regulation, except paragraphs 6., 7. and Appendices 1 and 2. But the side-impact dummy shall be installed in the front seat on the impact side.
5.2.1. The performance criteria, as determined for the collision test in accordance with the Appendix 1 to Annex 4 to this Regulation shall meet the following conditions:
5.2.1.1. The head performance criterion (HPC) shall be less than or equal to 1,000; when there is no head contact, then the HPC shall not be measured or calculated but recorded as "No Head Contact."
5.2.1.2. The thorax performance criteria shall be:
(a) Rib Deflection Criterion (RDC) less than or equal to 42 mm;
(b) Soft Tissue Criterion (VC) less or equal to 1.0 m/sec.
For a transitional period of two years after the date specified in paragraph 10.2. of this Regulation the V * C value is not a pass/fail criterion for the approval testing, but this value has to be recorded in the test report and to be collected by the approval authorities. After this transitional period, the VC value of 1.0 m/sec shall apply as a pass/fail criterion unless the Contracting Parties applying this Regulation decide otherwise.
5.2.1.3. The pelvis performance criterion shall be:
Pubic Symphysis Peak Force (PSPF) less than or equal to 6 kN.
5.2.1.4. The abdomen performance criterion shall be:
Abdominal Peak Force (APF) less than or equal to 2.5 kN internal force (equivalent to external force of 4.5 kN).
5.3. Particular requirements
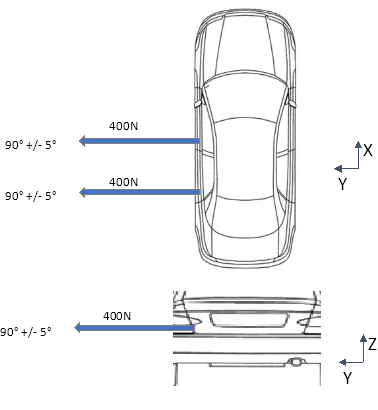
5.3.1. No door shall open during the test.
This requirement is deemed to be fulfilled:
(a) If it is clearly visible, that the door lock is latched; or
(b) If the door does not open under a static tractive force of at least 400 N in the y-direction applied to the door, according to the Figure below, as close as possible to the window sill and to the edge of the door opposite to the hinged side, except to the door handle itself.
Figure
5.3.1.1. In the case of automatically activated door locking systems which are installed optionally and/or which can be de-activated by the driver, this requirement shall be verified by using one of the following two test procedures, at the choice of the manufacturer:
5.3.1.1.1. If testing in accordance with Annex 4, paragraph 5.2.2.1., the manufacturer shall in addition demonstrate to the satisfaction of the Technical Service (e.g. manufacturer’s in-house data) that, in the absence of the system or when the system is de-activated, no door will open in case of the impact.
5.3.1.1.2. If testing in accordance with Annex 4, paragraph 5.2.2.2., the manufacturer shall in addition demonstrate that the inertial load requirements of paragraph 6.1.4. of the 03 series of amendments to Regulation No. 11 are met for the unlocked side doors on the non-struck side.
5.3.2. After the impact, the side doors on the non-struck side shall be unlocked.
5.3.2.1. In the case of vehicles equipped with an automatically activated door locking system, the doors shall be locked before the moment of impact and be unlocked after the impact at least on the non-struck side.
5.3.2.2. In the case of automatically activated door locking systems which are installed optionally and/or which can be de-activated by the driver, this requirement shall be verified by using one of the following two test procedures, at the choice of the manufacturer:
5.3.2.2.1. If testing in accordance with Annex 4, paragraph 5.2.2.1, the manufacturer shall in addition demonstrate to the satisfaction of the Technical Service (e.g. manufacturer’s in-house data) that, in the absence of the system or when the system is de-activated, the side doors on the non-struck side are unlocked after the impact.
5.3.2.2.2. If testing in accordance with paragraph Annex 4, paragraph 5.2.2.2. the manufacturer shall in addition demonstrate that when applying the inertial load of paragraph 6.1.4. of the 03 series of amendments to Regulation No. 11, the unlocked side doors on the non-struck side remain unlocked.
5.3.3. After the impact, it shall be possible without the use of tools to:
5.3.3.1. Open at least one door per row of seats. Where there is no such door, it shall be possible to allow the evacuation of all the occupants by activating the displacement system of seats, if necessary. In case no displacement system is available for the evacuation of a rear seated occupant, it shall be shown that a 50th percentile manikin can be evacuated without the use of any devices to support its weight and any other tools.
For vehicles of category N1 this evacuation may be done via an emergency window if this window can be easily opened, but if tools are necessary, (e.g. for breaking the window) these tools shall then be provided by the manufacturer and shall be visible and located in close proximity to that emergency window.
This shall be assessed for all configurations or worst-case configuration for number of doors on each side of the vehicle and for both left-hand drive and right-hand drive vehicles, when applicable.
5.3.3.2. Release the dummy from the protective system;
5.3.3.3. Remove the dummy from the vehicle;
5.3.4. No interior device or component shall become detached in such a way as noticeably to increase the risk of injury from sharp projections or jagged edges;
5.3.5. Ruptures, resulting from permanent deformation are acceptable, provided these do not increase the risk of injury;
5.3.6. If there is continuous leakage of liquid from the fuel-feed installation after the collision, the rate of leakage shall not exceed 30 g/min; if the liquid from the fuel-feed system mixes with liquids from the other systems and the various liquids cannot easily be separated and identified, all the liquids collected shall be taken into account in evaluating the continuous leakage.
5.3.7. Following the test conducted in accordance with the procedure defined in Annex 4 to this Regulation, the electric power train operating on high voltage, and the high voltage systems which are galvanically connected to the high voltage bus of the electric power train, shall meet the following requirements:
5.3.7.1. Protection against electrical shock
After the impact, the high voltage buses shall meet at least one of the four criteria specified in paragraph 5.3.7.1.1. through paragraph 5.3.7.1.4.2.
If the vehicle has an automatic disconnect function, or device(s) that conductively divide the electric power train circuit during driving condition, at least one of the following criteria shall apply to the disconnected circuit or to each divided circuit individually after the disconnect function is activated.
However, criteria defined in 5.3.7.1.4. shall not apply if more than a single potential of a part of the high voltage bus is not protected under the conditions of protection degree IPXXB.
In the case that the crash test is performed under the condition that part(s) of the high voltage system are not energized and with the exception of any coupling system for charging the REESS which is not energized during driving condition, the protection against electrical shock shall be proved by either paragraphs 5.3.7.1.3. or 5.3.7.1.4. below for the relevant part(s).
5.3.7.1.1. Absence of high voltage
The voltages Ub, U1 and U2 of the high voltage buses shall be equal or less than 30 VAC or 60 VDC within 60 s after the impact when measured in accordance with paragraph 2. of Annex 9.
5.3.7.1.2. Low electrical energy
The total energy (TE) on the high voltage buses shall be less than 0.2 joules when measured according to the test procedure as specified in paragraph 3. of Annex 9 with the formula (a). Alternatively, the total energy (TE) may be calculated by the measured voltage Ub of the high voltage bus and the capacitance of the X-capacitors (Cx) specified by the manufacturer according to formula (b) of paragraph 3. of Annex 9.
The energy stored in the Y-capacitors (TEy1, TEy2) shall also be less than 0.2 joules. This shall be calculated by measuring the voltages U1 and U2 of the high voltage buses and the electrical chassis, and the capacitance of the
Y-capacitors specified by the manufacturer according to formula (c) of paragraph 3. of Annex 9.
5.3.7.1.3. Physical protection
For protection against direct contact with high voltage live parts, the protection degree IPXXB shall be provided.
The assessment shall be conducted in accordance with paragraph 4 of Annex 9.
In addition, for protection against electrical shock which could arise from indirect contact, the resistance between all exposed conductive parts of electrical protection barriers/enclosures and the electrical chassis shall be lower than 0.1 Ω and the resistance between any two simultaneously reachable exposed conductive parts of electrical protection barriers/enclosures that are less than 2.5 m from each other shall be less than 0.2 Ω when there is current flow of at least 0.2 A. This resistance may be calculated using the separately measured resistances of the relevant parts of electric path.
These requirements are satisfied if the galvanic connection has been made by welding. In case of doubt or the connection is established by mean other than welding, measurements shall be made by using one of the test procedures described in paragraph 4 of Annex 9.
5.3.7.1.4. Isolation resistance
The criteria specified in the paragraphs 5.3.7.1.4.1. and 5.3.7.1.4.2. below shall be met.
The measurement shall be conducted in accordance with paragraph 5. of Annex 9.
5.3.7.1.4.1. Electrical power train consisting of separate DC- or AC-buses.
If the AC high voltage buses and the DC high voltage buses are galvanically isolated from each other, isolation resistance between the high voltage bus and the electrical chassis (Ri, as defined in paragraph 5. of Annex 9) shall have a minimum value of 100 Ω/V of the working voltage for DC buses, and a minimum value of 500 Ω/V of the working voltage for AC buses.
5.3.7.1.4.2. Electric power train consisting of combined DC- and AC-buses
If the AC high voltage buses and the DC high voltage buses are conductively connected, they shall meet one of the following requirements:
(a) Isolation resistance between the high voltage bus and the electrical chassis shall have a minimum value of 500 Ω/V of the working voltage;
(b) Isolation resistance between the high voltage bus and the electrical chassis shall have a minimum value of 100 Ω/V of the working voltage and the AC bus meets the physical protection as described in paragraph 5.3.7.1.3;
(c) Isolation resistance between the high voltage bus and the electrical chassis shall have a minimum value of 100 Ω/V of the working voltage and the AC bus meets the absence of high voltage as described in paragraph 5.3.7.1.1.
5.3.7.2. Electrolyte leakage
5.3.7.2.1. In case of aqueous electrolyte REESS.
For a period from the impact until 60 minutes after the impact, there shall be no electrolyte leakage from the REESS into the passenger compartment and no more than 7 per cent by volume of the REESS electrolyte with a maximum of 5.0 l leaked from the REESS to the outside of the passenger compartment. The leaked amount of electrolyte can be measured by usual techniques of determination of liquid volumes after its collection. For containers containing Stoddard, coloured coolant and electrolyte, the fluids shall be allowed to separate by specific gravity then measured.
5.3.7.2.2. In case of non-aqueous electrolyte REESS.
For a period from the impact until 60 minutes after the impact, there shall be no liquid electrolyte leakage from the REESS into the passenger compartment, luggage compartment and no liquid electrolyte leakage to outside the vehicle. This requirement shall be verified by visual inspection without disassembling any part of the vehicle
5.3.7.3. REESS retention
REESS shall remain attached to the vehicle by at least one component anchorage, bracket, or any structure that transfers loads from REESS to the vehicle structure, and REESS located outside the passenger compartment shall not enter the passenger compartment.
5.3.7.4. REESS fire hazards
For a period from the impact until 60 minutes after the impact, there shall be no evidence of fire or explosion from the REESS.
5.3.8. The fuel system and high voltage system shall be assessed for all configurations or worst-case configuration for left-hand drive and right-hand drive vehicles, when applicable.
6. Modification of the vehicle type
6.1. Every modification of the vehicle type with regard to this Regulation shall be notified to the Type Approval Authority which approved that vehicle type. The Type Approval Authority may then either:
(a) Decide, in consultation with the manufacturer, that a new type approval is to be granted; or
(b) Apply the procedure contained in paragraph 6.1.1. (Revision) and, if applicable, the procedure contained in paragraph 6.1.2. (Extension).
6.1.1. Revision
When particulars recorded in the information documents have changed and the Type Approval Authority considers that the modifications made are unlikely to have appreciable adverse effect, and that in any case the vehicle still meets the requirements, the modification shall be designated a "revision".
In such a case, the Type Approval Authority shall issue the revised pages of the information documents of as necessary, marking each revised page to show clearly the nature of the modification and the date of re-issue. A consolidate,updated version of the information documents accompanied by a detailed description of the modification, shall be deemed to meet this requirement.
6.1.2. Extension
The modification shall be designated an "extension" if, in addition to the change of the particulars recorded in the information folder:
(a) Further inspections or tests are required; or
(b) Any information on the communication document (with the exception of its attachments) has changed; or
(c) Approval to a later series of amendments is requested after its entry into force.
6.1.2.1. Any modification of the vehicle affecting the general form of the structure of the vehicle or any variation in the reference mass greater than 8 per cent which in the judgement of the authority would have a marked influence on the results of the test shall require a repetition of the test as described in Annex 4.
6.1.2.2. If the Technical Service, after consultation with the vehicle manufacturer, considers that modifications to a vehicle type are insufficient to warrant a complete retest then a partial test may be used. This would be the case if the reference mass is not more than 8 per cent different from the original vehicle or the number of front seats is unchanged. Variations of seat type or interior fittings need not automatically entail a full retest. An example of the approach to this problem is given in Annex 8.
6.2. Notice of confirmation, extension, or refusal of approval shall be communicated by the procedure specified in paragraph 4.3. above, to the Contracting Parties to the Agreement applying this Regulation. In addition, the index to the information documents and to the test reports, attached to the communication document of Annex 1, shall be amended accordingly to show the date of the most recent revision or extension.
7. Conformity of production
The conformity of production procedure shall comply with the requirements set out in Schedule 1 of the Agreement (E/ECE/TRANS/505/Rev.3).
7.1. Vehicles approved under this Regulation shall be so manufactured as to conform to the type approved by meeting the requirements of the relevant part(s) of this Regulation.
7.2. In order to verify that the requirements of paragraph 7.1. are met, appropriate production checks shall be carried out.
7.3. The Type Approval Authority which has granted type approval may at any time verify the conformity control methods applied in each production facility. The normal frequency of these verifications shall be once every two years.
8. Penalties for non-conformity of production
8.1. The approval granted in respect of a vehicle type pursuant to this Regulation may be withdrawn if the requirement laid down in paragraph 7.1. above is not complied with.
8.2. If a Contracting Party to the Agreement applying this Regulation withdraws an approval it has previously granted, it shall forthwith so notify the other Contracting Parties applying this Regulation, by means of a copy of the approval form bearing at the end, in large letters, the signed and dated annotation "APPROVAL WITHDRAWN".
9. Production definitively discontinued
If the holder of the approval completely ceases to manufacture the type of vehicle approved in accordance with the Regulation, he shall so inform the Type Approval Authority which granted the approval. Upon receiving the relevant communication that Type Approval Authority shall inform thereof the other Parties to the Agreement applying this Regulation by means of a copy of the approval form bearing at the end, in large letters, the signed and dated annotation "PRODUCTION DISCONTINUED".
10. Names and addresses of Technical Services responsible for conducting approval tests, and of Type Approval Authorities
The Contracting Parties to the Agreement applying this Regulation shall communicate to the United Nations secretariat the names and addresses of the Technical Services responsible for conducting approval tests, and of the Type Approval Authority which grant approval and to which forms certifying approval or extension, or refusal or withdrawal of approval, issued in other countries, are to be sent.
11. Transitional provisions
11.1. As from the official date of entry into force of the 05 series of amendments, no Contracting Party applying this Regulation shall refuse to grant or refuse to accept type-approvals under this Regulation as amended by the 05 series of amendments.
11.2. As from 1 September 2023, Contracting Parties applying this Regulation shall not be obliged to accept type-approvals of vehicles according to the preceding series of amendments, first issued after 1 September 2023.
11.3. Contracting Parties applying this Regulation shall continue to accept type-approvals of vehicles according to the preceding series of amendments first issued before 1 September 2023, provided the transitional provisions in these respective previous series of amendments foresee this possibility.
11.4. Contracting Parties applying this Regulation shall not refuse to grant type-approvals according to any preceding series of amendments to this Regulation or extensions thereof.
11.5. Notwithstanding the transitional provisions above, Contracting Parties who start to apply this Regulation after the date of entry into force of the most recent series of amendments are not obliged to accept type-approvals which were granted in accordance with any of the preceding series of amendments to this Regulation.
Annex 1
Communication
(maximum format: A4 (210 x 297 mm))


Concerning:[2] Approval granted
Approval extended
Approval refused
Approval withdrawn
Production definitively discontinued
of a vehicle type with regard to protection of occupants in the event of a lateral collision pursuant to Regulation No. 95
Approval No. …………………….………. Extension No. ……………………………
1. Trade name or mark of the power-driven vehicle: ....................
2. Vehicle type: ............................................
3. Manufacturer’s name and address: ..............................
4. If applicable, name and address of manufacturer’s representative:..........
5. Vehicle submitted for approval on:..............................
6. Side impact dummy utilized ES-1/ES-2:2..........................
7. Location of the electric power source: .......................
8. Technical Service responsible for conducting approval tests:..............
9. Date of test report:.........................................
10. Number of test report:.......................................
11. Approval granted/refused/extended/withdrawn:2......................
12. Position of approval mark on the vehicle:..........................
13. Place:..................................................
14. Date:.........................................................................................
15. Signature:...............................................
16. The list of documents deposited with the Type Approval Authority which has granted approval is annexed to this communication and may be obtained on request.
Annex 2
Arrangements of the approval mark
Model A
(See paragraph 4.5. of this Regulation)

The above approval mark affixed to a vehicle shows that the vehicle type concerned has, with regard to the protection of the occupants in the event of a lateral collision, been approved in the Netherlands (E 4) pursuant to UN Regulation No. 95 under approval number 051424. The approval number indicates that the approval was granted in accordance with the requirements of UN Regulation No. 95 as amended by the 05 series of amendments.
Model B
(See paragraph 4.6. of this Regulation)

The above approval mark affixed to a vehicle shows that the vehicle type concerned has been approved in the Netherlands (E 4) pursuant to UN Regulations Nos. 95 and 24.[5] The first two digits of the approval numbers indicate that, at the dates when the respective approvals were granted. UN Regulation No. 95 incorporated the 05 series of amendments and UN Regulation No. 24 incorporated the 03 series of amendments.
Annex 4
Collision test procedure
1. Installations
1.1. Testing ground
The test area shall be large enough to accommodate the mobile deformable barrier propulsion system and to permit after-impact displacement of the vehicle impacted and installation of the test equipment. The part in which vehicle impact and displacement occur shall be horizontal, flat and uncontaminated, and representative of a normal, dry, uncontaminated road surface.
2. Test conditions
2.1. The vehicle to be tested shall be stationary.
2.2. The mobile deformable barrier shall have the characteristics set out in Annex 5 to this Regulation. Requirements for the examination are given in the appendices to Annex 5. The mobile deformable barrier shall be equipped with a suitable device to prevent a second impact on the struck vehicle.
2.3. The trajectory of the mobile deformable barrier longitudinal median vertical plane shall be perpendicular to the longitudinal median vertical plane of the impacted vehicle.
2.4. The longitudinal vertical median plane of the mobile deformable barrier shall be coincident within ±25 mm with a transverse vertical plane passing through the R point of the front seat adjacent to the struck side of the tested vehicle. The horizontal median plane limited by the external lateral vertical planes of the front face shall be at the moment of impact within two planes determined before the test and situated 25 mm above and below the previously defined plane.
2.5. Instrumentation shall comply with ISO 6487:1987 unless otherwise specified in this Regulation.
2.6. The stabilized temperature of the test dummy at the time of the side impact test shall be 22 ± 4 °C.
3. Test speed
The mobile deformable barrier speed at the moment of impact shall be 50 ± 1 km/h. This speed shall be stabilized at least 0.5 m before impact. Accuracy of measurement: 1 per cent. However, if the test was performed at a higher impact speed and the vehicle met the requirements, the test shall be considered satisfactory.
4. State of the vehicle
4.1. General specification
The test vehicle shall be representative of the series production, shall include all the equipment normally fitted and shall be in normal running order. Some components may be omitted or replaced by equivalent masses where this omission or substitution clearly has no effect on the results of the test.
It shall be allowed by agreement between manufacturer and Technical Service to modify the fuel system so that an appropriate amount of fuel can be used to run the engine or the electrical energy conversion system.
4.2. Vehicle equipment specification
The test vehicle shall have all the optional arrangements or fittings likely to influence the results of the test.
4.3. Mass of the vehicle
4.3.1. The vehicle to be tested shall have the reference mass as defined in paragraph 2.10. of this Regulation. The mass of the vehicle shall be adjusted to ±1 per cent of the reference mass.
4.3.2. The fuel tank shall be filled with water to a mass equal to 90 per cent of the mass of a full load of fuel as specified by the manufacturer with a tolerance of ±1 per cent.
This requirement does not apply to hydrogen fuel tanks.
4.3.3. All the other systems (brake, cooling, etc.) may be empty; in this case, the mass of the liquids shall be offset.
4.3.4. If the mass of the measuring apparatus on board of the vehicle exceeds the 25 kg allowed, it may be offset by reductions which have no noticeable effect on the results of the test.
4.3.5. The mass of the measuring apparatus shall not change each axle reference load by more than 5 per cent, each variation not exceeding 20 kg.
5. Preparation of the vehicle
5.1. The side windows at least on the struck side shall be closed.
5.2. The doors shall be closed, but not locked.
5.2.1. However, in the case of vehicles equipped with an automatically activated door locking system, it shall be ensured that all the side doors are locked before the test.
5.2.2. In the case of vehicles equipped with an automatically activated door locking system, which is installed optionally and/or which can be de-activated by the driver, one of the following two procedures shall be used at the choice of the manufacturer:
5.2.2.1. All the side doors shall be locked manually before the start of the test.
5.2.2.2. It shall be ensured that the side doors on the struck side are unlocked and the side doors on the non-struck side locked before the impact; the automatically activated door-locking system may be overridden for this test.
5.3. The transmission shall be placed in neutral and the parking brake disengaged.
5.4. The comfort adjustments of the seats, if any, shall be adjusted to the position specified by the vehicle manufacturer.
5.5. The seat containing the dummy, and its elements, if adjustable, shall be adjusted as follows:
5.5.1. The longitudinal adjustment device shall be placed with the locking device engaged in the position that is nearest to midway between the foremost and rearmost positions; if this position is between two notches, the rearmost notch shall be used.
5.5.2. The head restraint shall be adjusted such that its top surface is level with the centre of gravity of the dummy’s head; if this is not possible, the head restraint shall be in the uppermost position.
5.5.3. Unless otherwise specified by the manufacturer, the seat-back shall be set such that the torso reference line of the three-dimensional H point machine is set at an angle of 25 ± 1°towards the rear.
5.5.4. All other seat adjustments shall be at the mid-point of available travel; however, height adjustment shall be at the position corresponding to the fixed seat, if the vehicle type is available with adjustable and fixed seats. If locking positions are not available at the respective mid-points of travel, the positions immediately rearward, down, or outboard of the mid-points shall be used. For rotational adjustments (tilt), rearward will be the adjustment direction which moves the head of the dummy rearwards. If the dummy protrudes outside the normal passenger volume, e.g. head into roof lining, then 1 cm clearance will be provided using: secondary adjustments, seat-back angle, or fore-aft adjustment in that order.
5.6. Unless otherwise specified by the manufacturer, the other front seats shall, if possible, be adjusted to the same position as the seat containing the dummy.
5.7. If the steering wheel is adjustable, all adjustments are positioned to their mid-travel locations.
5.8. Tyres shall be inflated to the pressure specified by the vehicle manufacturer.
5.9. The test vehicle shall be set horizontal about its roll axis and maintained by supports in that position until the side impact dummy is in place and after all preparatory work is complete.
5.10. The vehicle shall be at its normal attitude corresponding to the conditions set out in paragraph 4.3. above. Vehicles with suspension enabling their ground clearance to be adjusted shall be tested under the normal conditions of use at 50 km/h as defined by the vehicle manufacturer. This shall be assured by means of additional supports, if necessary, but such supports shall have no influence on the crash behaviour of the test vehicle during the impact.
5.11. Electrical power train adjustment
5.11.1. Procedures for SOC adjustment.
5.11.1.1. The adjustment of SOC shall be conducted at an ambient temperature of 20 ± 10 °C.
5.11.1.2. The SOC shall be adjusted according to one of the following procedures as applicable. Where different charging procedures are possible, the REESS shall be charged using the procedure which yields the highest SOC:
(a) For a vehicle with a REESS designed to be externally charged, the REESS shall be charged to the highest SOC in accordance with the procedure specified by the manufacturer for normal operation until the charging process is normally terminated.
(b) For a vehicle with a REESS designed to be charged only by an energy source on the vehicle, the REESS shall be charged to the highest SOC which is achievable with normal operation of the vehicle. The manufacturer shall advise on the vehicle operation mode to achieve this SOC.
5.11.1.3. When the vehicle is tested, the SOC shall be no less than 95 per cent of the SOC according to paragraphs 5.11.1.1. and 5.11.1.2. for REESS designed to be externally charged and shall be no less than 90 per cent of SOC according to paragraphs 5.11.1.1. and 5.11.1.2. for REESS designed to be charged only by an energy source on the vehicle. The SOC will be confirmed by a method provided by the manufacturer.
5.11.2. The electrical power train shall be energized with or without the operation of the original electrical energy sources (e.g. engine-generator, REESS or electric energy conversion system), however:
5.11.2.1. By the agreement between Technical Service and manufacturer it shall be permissible to perform the test with all or parts of the electrical power train not being energized insofar as there is no negative influence on the test result. For parts of the electrical power train not energized, the protection against electrical shock shall be proved by either physical protection or isolation resistance and appropriate additional evidence.
5.11.2.2. In the case where an automatic disconnect is provided, at the request of the manufacturer it shall be permissible to perform the test with the automatic disconnection being triggered. In this case it shall be demonstrated that the automatic disconnect would have operated during the impact test. This includes the automatic activation signal as well as the galvanic separation considering the conditions as seen during the impact.
6. Side impact dummy and its installation
6.1. The side impact dummy shall comply with the specifications given in Annex 6 and be installed in the front seat on the impact side according to the procedure given in Annex 7 to this Regulation.
6.2. The safety-belts or other restraint systems, which are specified for the vehicle, shall be used. Belts should be of an approved type, conforming to Regulation No. 16 or to other equivalent requirements and mounted on anchorages conforming to Regulation No. 14 or to other equivalent requirements.
6.3. The safety-belt or restraint system shall be adjusted to fit the dummy in accordance with the manufacturer’s instructions; if there are no manufacturer’s instructions, the height adjustment shall be set at middle position; if this position is not available, the position immediately below shall be used.
7. Measurements to be made on the side impact dummy
7.1. The readings of the following measuring devices are to be recorded.
7.1.1. Measurements in the head of the dummy
The resultant triaxial acceleration referring to the head centre of gravity. The head channel instrumentation shall comply with ISO 6487:1987 with:
CFC: 1,000 Hz, and
CAC: 150 g
7.1.2. Measurements in the thorax of the dummy
The three thorax rib deflection channels shall comply with ISO 6487:1987
CFC: 1,000 Hz
CAC: 60 mm
7.1.3. Measurements in the pelvis of the dummy
The pelvis force channel shall comply with ISO 6487:1987
CFC: 1,000 Hz
CAC: 15 kN
7.1.4. Measurements in the abdomen of the dummy
The abdomen force channels shall comply with ISO 6487:1987
CFC: 1,000 Hz
CAC: 5 kN
Annex 4 - Appendix 1
Determination of performance data
The required results of the tests are specified in paragraph 5.2. of this Regulation.
1. Head performance criterion (HPC)
When head contact takes place, this performance criterion is calculated for the total duration between the initial contact and the last instant of the final contact.
HPC is the maximum value of the expression:
Where a is the resultant acceleration at the centre of gravity of the head in metres per second divided by 9.81 recorded versus time and filtered at channel frequency class 1,000 Hz; t1 and t2 are any two times between the initial contact and the last instant of the final contact.
2. Thorax performance criteria
2.1. Chest deflection: the peak chest deflection is the maximum value of deflection on any rib as determined by the thorax displacement transducers, filtered at channel frequency class 180 Hz.
2.2. Viscous criterion: the peak viscous response is the maximum value of VC on any rib which is calculated from the instantaneous product of the relative thorax compression related to the half thorax and the velocity of compression derived by differentiation of the compression, filtered at channel frequency class 180 Hz. For the purposes of this calculation the standard width of the half thorax rib cage is 140 mm.
Where D (metres) = rib deflection
The calculation algorithm to be used is set out in Annex 4, Appendix 2.
3. Abdomen protection criterion
The peak abdominal force is the maximum value of the sum of the three forces measured by transducers mounted 39 mm below the surface on the crash side, CFC 600 Hz.
4. Pelvis performance criterion
The pubic symphisis peak force (PSPF) is the maximum force measured by a load cell at the pubic symphysis of the pelvis, filtered at channel frequency class 600 Hz.
Annex 4 - Appendix 2
The procedure for calculating the viscous criterion for EUROSID 1
The Viscous Criterion, VC, is calculated as the instantaneous product of the compression and the rate of deflection of the rib. Both are derived from the measurement of rib deflection. The rib deflection response is filtered once at Channel Frequency Class 180. The compression at time (t) is calculated as the deflection from this filtered signal expressed as the proportion of the half width of the EUROSID 1 chest, measured at the metal ribs (0.14 metres):

The rib deflection velocity at time (t) is calculated from the filtered deflection as:

where D(t) is the deflection at time (t) in metres and t is the time interval in seconds between the measurements of deflection. The maximum value of t shall be 1,25 x 10-4seconds.
This calculation procedure is shown diagrammatically below:

Annex 5
Mobile deformable barrier characteristics
1. Characteristics of the mobile deformable barrier
1.1. The mobile deformable barrier (MDB) includes both an impactor and a trolley.
1.2. The total mass shall be 950 ± 20 kg.
1.3. The centre of gravity shall be situated in the longitudinal median vertical plane within 10 mm, 1,000 ± 30 mm behind the front axle and 500 ± 30 mm above the ground.
1.4. The distance between the front face of the impactor and the centre of gravity of the barrier shall be 2,000 ± 30 mm.
1.5. The ground clearance of the impactor shall be 300 ± 5 mm measured in static conditions from the lower edge of the lower front plate, before the impact.
1.6. The front and rear track width of the trolley shall be 1,500 ± 10 mm.
1.7. The wheelbase of the trolley shall be 3,000 ± 10 mm.
2. Characteristics of the impactor
The impactor consists of six single blocks of aluminium honeycomb, which have been processed in order to give a progressively increasing level of force with increasing deflection (see paragraph 2.1. below). Front and rear aluminium plates are attached to the aluminium honeycomb blocks.
2.1. Honeycomb blocks
2.1.1. Geometrical characteristics
2.1.1.1. The impactor consists of six joined zones whose forms and positioning are shown in Figures 1 and 2. The zones are defined as 500 ± 5 mm x 250 ± 3 mm in Figures 1 and 2. The 500 mm should be in the W direction and the 250 mm in the L direction of the aluminium honeycomb construction (see Figure 3).
2.1.1.2. The impactor is divided into 2 rows. The lower row shall be 250 ± 3 mm high, and 500 ± 2mm deep after pre-crush (see paragraph 2.1.2. below), and deeper than the upper row by 60 ± 2 mm.
2.1.1.3. The blocks must be centred on the six zones defined in Figure 1 and each block (including incomplete cells) should cover completely the area defined for each zone).
2.1.2. Pre-crush
2.1.2.1. The pre-crush shall be performed on the surface of the honeycomb to which the front sheets are attached.
2.1.2.2. Blocks 1, 2 and 3 should be crushed by 10 ± 2 mm on the top surface prior to testing to give a depth of 500 ± 2 mm (Figure 2).
2.1.2.3. Blocks 4, 5 and 6 should be crushed by 10 ± 2 mm on the top surface prior to testing to give a depth of 440 ± 2 mm.
2.1.3. Material characteristics
2.1.3.1. The cell dimensions shall be 19 mm ± 10 per cent for each block (see Figure 4).
2.1.3.2. The cells must be made of 3003 aluminium for the upper row.
2.1.3.3. The cells must be made of 5052 aluminium for the lower row.
2.1.3.4. The aluminium honeycomb blocks should be processed such that the force deflection-curve when statically crushed (according to the procedure defined in paragraph 2.1.4. below) is within the corridors defined for each of the six blocks in Appendix 1 to this annex. Moreover, the processed honeycomb material used in the honeycomb blocks to be used for constructing the barrier, should be cleaned in order to remove any residue that may have been produced during the processing of the raw honeycomb material.
2.1.3.5. The mass of the blocks in each batch shall not differ by more than 5 per cent of the mean block mass for that batch.
2.1.4. Static tests
2.1.4.1. A sample taken from each batch of processed honeycomb core shall be tested according to the static test procedure described in paragraph 5. of this annex.
2.1.4.2. The force-compression for each block tested shall lie within the force deflection corridors defined in Appendix 1. Static force-deflection corridors are defined for each block of the barrier.
2.1.5. Dynamic test
2.1.5.1. The dynamic deformation characteristics, when impacted according to the protocol described in paragraph 6. of this annex.
2.1.5.2. Deviation from the limits of the force-deflection corridors characterising the rigidity of the impactor - as defined in Appendix 2 of this annex - may be allowed provided that:
2.1.5.2.1. The deviation occurs after the beginning of the impact and before the deformation of the impactor is equal to 150 mm;
2.1.5.2.2. The deviation does not exceed 50 per cent of the nearest instantaneous prescribed limit of the corridor;
2.1.5.2.3. Each deflection corresponding to each deviation does not exceed 35 mm of deflection, and the sum of these deflections does not exceed 70 mm (see Appendix 2 to this annex);
2.1.5.2.4. The sum of energy derived from deviating outside the corridor does not exceed 5 per cent of the gross energy for that block.
2.1.5.3. Blocks 1 and 3 are identical. Their rigidity is such that their force deflection curves fall between corridors of Figure 2a.
2.1.5.4. Blocks 5 and 6 are identical. Their rigidity is such that their force deflection curves fall between corridors of Figure 2d.
2.1.5.5 The rigidity of block 2 is such that its force deflection curves fall between corridors of Figure 2b.
2.1.5.6. The rigidity of block 4 is such that its force deflection curves fall between corridors of Figure 2c.
2.1.5.7. The force-deflection of the impactor as a whole shall fall between corridors of Figure 2e.
2.1.5.8. The force-deflection curves shall be verified by a test detailed in Annex 5, paragraph 6., consisting of an impact of the barrier against a dynamometric wall at 35 ± 0.5 km/h.
2.1.5.9. The dissipated energy[7] against blocks 1 and 3 during the test shall be equal to 9.5 ± 2 kJ for these blocks.
2.1.5.10. The dissipated energy against blocks 5 and 6 during the test shall be equal to
3.5 ± 1 kJ for these blocks.
2.1.5.11. The dissipated energy against block 4 shall be equal to 4 ± 1 kJ.
2.1.5.12. The dissipated energy against block 2 shall be equal to 15 ± 2 kJ.
2.1.5.13. The dissipated total energy during the impact shall be equal to 45 ± 3 kJ.
2.1.5.14. The maximum impactor deformation from the point of first contact, calculated from integration of the accelerometers according to paragraph 6.6.3. of this annex, shall be equal to 330 ± 20 mm.
2.1.5.15. The final residual static impactor deformation measured after the dynamic test at level B (Figure 2) shall be equal to 310 ± 20 mm.
2.2. Front plates
2.2.1. Geometrical characteristics
2.2.1.1. The front plates are 1,500 ± 1 mm wide and 250 ± 1 mm high. The thickness is 0.5 ± 0.06 mm.
2.2.1.2. When assembled the overall dimensions of the impactor (defined in Figure 2) shall be: 1,500 ± 2.5 mm wide and 500 ± 2.5 mm high.
2.2.1.3. The upper edge of the lower front plate and the lower edge of the upper front plate should be aligned within 4 mm.
2.2.2. Material characteristics
2.2.2.1. The front plates are manufactured from aluminium of series AlMg2 to AlMg3 with elongation 12 per cent, and a UTS 175 N/mm2.
2.3. Back plate
2.3.1. Geometric characteristics
2.3.1.1. The geometric characteristics shall be according to Figures 5 and 6.
2.3.2. Material characteristics
2.3.2.1. The back plate shall consist of a 3 mm aluminium sheet. The back plate shall be manufactured from aluminium of series AlMg2 to AlMg3 with hardness between 50 and 65 HBS. This plate shall be perforated with holes for ventilation: the location, the diameter and pitch are shown in Figures 5 and 7.
2.4. Location of the honeycomb blocks
2.4.1. The honeycomb blocks shall be centred on the perforated zone of the back plate (Figure 5).
2.5. Bonding
2.5.1. For both the front and the back plates, a maximum of 0.5 kg/m2 shall be applied evenly directly over the surface of the front plate, giving a maximum film thickness of 0.5 mm. The adhesive to be used throughout should be a two-part polyurethane {such as Ciba Geigy XB5090/1 resin with XB5304 hardener} or equivalent.
2.5.2. For the back plate the minimum bonding strength shall be 0.6 MPa, (87 psi), tested according to paragraph 2.5.3.
2.5.3. Bonding strength tests:
2.5.3.1. Flatwise tensile testing is used to measure bond strength of adhesives according to ASTM C297-61.
2.5.3.2. The test piece should be 100 mm x 100 mm, and 15 mm deep, bonded to a sample of the ventilated back plate material. The honeycomb used should be representative of that in the impactor, i.e. chemically etched to an equivalent degree as that near to the back plate in the barrier but without pre-crushing.
2.6. Traceability
2.6.1. Impactors shall carry consecutive serial numbers which are stamped, etched or otherwise permanently attached, from which the batches for the individual blocks and the date of manufacture can be established
2.7. Impactor attachment
2.7.1. The fitting on the trolley must be according to Figure 8. The fitting will use six M8 bolts, and nothing shall be larger than the dimensions of the barrier in front of the wheels of the trolley. Appropriate spacers must be used between the lower back plate flange and the trolley face to avoid bowing of the back plate when the attachment bolts are tightened.
3. Ventilation system
3.1. The interface between the trolley and the ventilation system should be solid, rigid and flat. The ventilation device is part of the trolley and not of the impactor as supplied by the manufacturer. Geometrical characteristics of the ventilation device shall be according to Figure 9.
3.2. Ventilation device mounting procedure.
3.2.1. Mount the ventilation device to the front plate of the trolley;
3.2.2. Ensure that a 0.5 mm thick gauge cannot be inserted between the ventilation device and the trolley face at any point. If there is a gap greater than 0.5 mm, the ventilation frame will need to be replaced or adjusted to fit without a gap
of > 0.5 mm.
3.2.3. Dismount the ventilation device from the front of the trolley;
3.2.4. Fix a 1.0 mm thick layer of cork to the front face of the trolley;
3.2.5. Re-mount the ventilation device to the front of the trolley and tighten to exclude air gaps.
4. Conformity of production
The conformity of production procedures shall comply with those set out in the Agreement, Appendix 2 (E/ECE/324-E/ECE/TRANS/505/Rev.2), with the following requirements:
4.1. The manufacturer shall be responsible for the conformity of production procedures and for that purpose must in particular:
4.1.1. Ensure the existence of effective procedures so that the quality of the products can be inspected;
4.1.2. Have access to the testing equipment needed to inspect the conformity of each product;
4.1.3. Ensure that the test results are recorded and that the documents remain available for a time period of 10 years after the tests;
4.1.4. Demonstrate that the samples tested are a reliable measure of the performance of the batch (examples of sampling methods according to batch production are given below).
4.1.5. Analyse results of tests in order to verify and ensure the stability of the barrier characteristics, making allowance for variations of an industrial production, such as temperature, raw materials quality, time of immersion in chemical, chemical concentration, neutralisation etc., and the control of the processed material in order to remove any residue from the processing.
4.1.6. Ensure that any set of samples or test pieces giving evidence of non-conformity gives rise to a further sampling and test. All the necessary steps must be taken to restore conformity of the corresponding production.
4.2. The manufacturer's level of certification must be at least ISO 9002 standard.
4.3. Minimum conditions for the control of production: the holder of an agreement will ensure the control of conformity following the methods hereunder described.
4.4. Examples of sampling according to batch
4.4.1. If several examples of one block type are constructed from one original block of aluminium honeycomb and are all treated in the same treatment bath (parallel production), one of these examples could be chosen as the sample, provided care is taken to ensure that the treatment is evenly applied to all blocks. If not, it may be necessary to select more than one sample.
4.4.2. If a limited number of similar blocks (say three to twenty) are treated in the same bath (serial production), then the first and last block treated in a batch, all of which are constructed from the same original block of aluminium honeycomb, should be taken as representative samples. If the first sample complies with the requirements but the last does not, it may be necessary to take further samples from earlier in the production until a sample that does comply is found. Only the blocks between these samples should be considered to be approved.
4.4.3. Once experience is gained with the consistency of production control, it may be possible to combine both sampling approaches, so that more than one groups of parallel production can be considered to be a batch provided samples from the first and last production groups comply.
5. Static tests
5.1. One or more samples (according to the batch method) taken from each batch of processed honeycomb core shall be tested, according to the following test procedure:
5.2. The sample size of the aluminium honeycomb for static tests shall be the size of a normal block of the impactor, that is to say 250 mm x 500 mm x 440 mm for top row and 250 mm x 500 mm x 500 mm for the bottom row.
5.3. The samples should be compressed between two parallel loading plates which are at least 20 mm larger than the block cross section.
5.4. The compression speed shall be 100 millimetres per minute, with a tolerance of 5 per cent.
5.5. The data acquisition for static compression shall be sampled at a minimum of 5 Hz.
5.6. The static test shall be continued until the block compression is at least 300 mm for blocks 4 to 6 and 350 mm for blocks 1 to 3.
6. Dynamic tests
For every 100 barrier faces produced, the manufacturer shall make one dynamic test against a dynamometric wall supported by a fixed rigid barrier, according to the method described below.
6.1. Installation
6.1.1. Testing ground
6.1.1.1. The test area shall be large enough to accommodate the run-up-track of the mobile deformable barrier, the rigid barrier and the technical equipment necessary for the test. The last part of the track, for at least 5 metres before the rigid barrier, shall be horizontal, flat and smooth.
6.1.2. Fixed rigid barrier and dynamometric wall
6.1.2.1. The rigid wall shall consist of a block of reinforced concrete not less than 3 metres wide and not less than 1.5 metres high. The thickness of the rigid wall shall be such that it weighs at least 70 tonnes.
6.1.2.2. The front face shall be vertical, perpendicular to the axis of the run-up-tack and equipped with six load cell plates, each capable of measuring the total load on the appropriate block of the mobile deformable barrier impactor at the moment of impact. The load cell impact plate area centres shall align with those of the six impact zones of the mobile deformable barrier face. Their edges shall clear adjacent areas by 20 mm such that, within the tolerance of impact alignment of the MDB, the impact zones will not contact the adjacent impact plate areas. Cell mounting and plate surfaces shall be in accordance with the requirements set out in the annex to standard ISO 6487:1987.
6.1.2.3. Surface protection, comprising a plywood face (thickness: 12 ± 1 mm), is added to each load cell plate such that it shall not degrade the transducer responses.
6.1.2.4. The rigid wall shall be either anchored in the ground or placed on the ground with, if necessary, additional arresting devices to limit its deflection. A rigid wall (to which the load cells are attached) having different characteristics but giving results that are at least equally conclusive may be used.
6.2. Propulsion of the mobile deformable barrier
At the moment of impact the mobile deformable barrier shall no longer be subject to the action of any additional steering or propelling device. It shall reach the obstacle on a course perpendicular to the front surface of the dynamometric wall. Impact alignment shall be accurate to within 10 mm.
6.3. Measuring instruments
6.3.1. Speed
The impact speed shall be 35 0.5 km/h the instrument used to record the speed on impact shall be accurate to within 0.1 per cent.
6.3.2. Loads
Measuring instruments shall meet the specifications set forth in ISO 6487:1987
CFC for all blocks: 60 Hz
CAC for blocks 1 and 3: 200 kN
CAC for blocks 4, 5 and 6: 100 kN
CAC for block 2: 200 kN
6.3.3. Acceleration
6.3.3.1. The acceleration in the longitudinal direction shall be measured at three separate positions on the trolley, one centrally and one at each side, at places not subject to bending.
6.3.3.2. The central accelerometer shall be located within 500 mm of the location of the centre of gravity of the MDB and shall lie in a vertical longitudinal plane which is within ±10 mm of the centre of gravity of the MDB.
6.3.3.3. The side accelerometers shall be at the same height as each other ±10 mm and at the same distance from the front surface of the MDB ±20 mm
6.3.3.4. The instrumentation shall comply with ISO 6487:1987 with the following specifications:
CFC 1,000 Hz (before integration)
CAC 50 g
6.4. General specifications of barrier
6.4.1. The individual characteristics of each barrier shall comply with paragraph 1. of this annex and shall be recorded.
6.5. General specifications of the impactor
6.5.1. The suitability of an impactor as regards the dynamic test requirements shall be confirmed when the outputs from the six load cell plates each produce signals complying with the requirements indicated in this annex.
6.5.2. Impactors shall carry consecutive serial numbers which are stamped, etched or otherwise permanently attached, from which the batches for the individual blocks and the date of manufacture can be established.
6.6. Data processing procedure
6.6.1. Raw data: At time T = T0, all offsets should be removed from the data. The method by which offsets are removed shall be recorded in the test report.
6.6.2. Filtering
6.6.2.1. The raw data will be filtered prior to processing/calculations.
6.6.2.2. Accelerometer data for integration will be filtered to CFC 180, ISO 6487:1987.
6.6.2.3. Accelerometer data for impulse calculations will be filtered to CFC 60, ISO 6487:1987.
6.6.2.4. Load cell data will be filtered to CFC 60, ISO 6487:1987.
6.6.3. Calculation of MDB face deflection
6.6.3.1. Accelerometer data from all three accelerometers individually (after filtering at CFC 180), will be integrated twice to obtain deflection of the barrier deformable element.
6.6.3.2. The initial conditions for deflection are:
6.6.3.2.1. Velocity = impact velocity (from speed measuring device).
6.6.3.2.2. Deflection = 0
6.6.3.3. The deflection at the left hand side, mid-line and right hand side of the mobile deformable barrier will be plotted with respect to time.
6.6.3.4. The maximum deflection calculated from each of the three accelerometers should be within 10 mm. If it is not the case, then the outlier should be removed and difference between the deflections calculated from the remaining two accelerometers checked to ensure that it is within 10 mm.
6.6.3.5. If the deflections as measured by the left hand side, right hand side and mid-line accelerometers are within 10 mm, then the mean acceleration of the three accelerometers should be used to calculate the deflection of the barrier face.
6.6.3.6. If the deflection from only two accelerometers meets the 10 mm requirement, then the mean acceleration from these two accelerometers should be used to calculate the deflection for the barrier face.
6.6.3.7. If the deflections calculated from all three accelerometers (left hand side, right hand side and mid-line) are NOT within the 10 mm requirement, then the raw data should be reviewed to determine the causes of such large variation. In this case the individual test house will determine which accelerometer data should be used to determine mobile deformable barrier deflection or whether none of the accelerometer readings can be used, in which case, the certification test must be repeated. A full explanation should be given in the test report.
6.6.3.8. The mean deflection-time data will be combined with the load cell wall force-time data to generate the force-deflection result for each block.
6.6.4. Calculation of energy
The absorbed energy for each block and for the whole MDB face should be calculated up to the point of peak deflection of the barrier.
Where: |
t0 | | is the time of first contact, |
t1 | | is the time where the trolley comes to rest, i.e. where u = 0, |
s | | is the deflection of the trolley deformable element calculated according to paragraph 6.6.3. |
6.6.5. Verification of dynamic force data
6.6.5.1. Compare the total impulse, I, calculated from the integration of the total force over the period of contact, with the momentum change over that period (M*V).
6.6.5.2. Compare the total energy change to the change in kinetic energy of the MDB, given by:

Where Vi is the impact velocity and M the whole mass of the MDB
If the momentum change (M*V) is not equal to the total impulse (I) ± 5 per cent, or if the total energy absorbed ( En) is not equal to the kinetic energy, EK ± 5 per cent, then the test data must be examined to determine the cause of this error.
Figure 1
Design of impactor[8]

Figure 2
Impact Top

Figure 3
Aluminium honeycomb orientation

Figure 4
Dimension of aluminium honeycomb cells

Figure 5
Design of the back plate

Front View
Figure 6
Attachment of backplate to ventillation device and trolley face plate
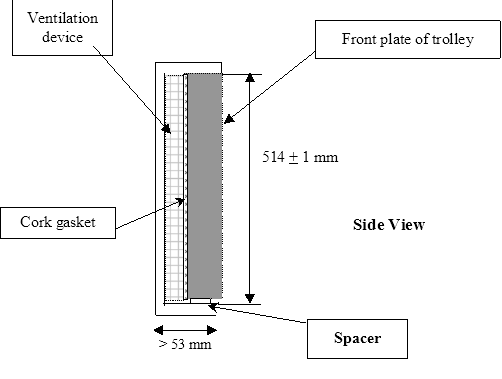
Figure 7
Staggered pitch for the back plate ventilation holes

Top and bottom back plate flanges

Note: The attachment holes in the bottom flange may be opened to slots, as shown below, for ease of attachment provided sufficient grip can be developed to avoid detachment during the whole impact test.
Figure 8
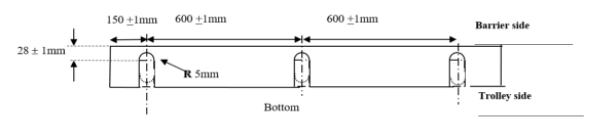
Figure 9
Ventilation frame
The ventilation device is a structure made of a plate that is 5 mm thick and 20 mm wide. Only the vertical plates are perforated with nine 8 mm holes in order to let air circulate horizontally.
 Side View
Side View
Annex 6
Technical description of the side impact dummy
1. General
1.1. The side impact dummy prescribed in this Regulation, including the instrumentation and calibration, is described in technical drawings and a user's manual.[9]
1.2. The dimensions and masses of the side impact dummy represent a 50th percentile adult male, without lower arms.
1.3. The side impact dummy consists of a metal and plastic skeleton covered by flesh-simulating rubber, plastic and foam.
2. Construction
2.1. For an overview of the side impact dummy see Figure 1 for a scheme and the parts breakdown in Table 1 of this annex.
2.2. Head
2.2.1. The head is shown as part No. 1 in Figure 1 of this annex.
2.2.2. The head consists of an aluminium shell covered by a pliable vinyl skin. The interior of the shell is a cavity accommodating tri-axial accelerometers and ballast.
2.2.3. At the head-neck interface a load cell replacement is built in. This part can be replaced with an upper neck load-cell.
2.3. Neck
2.3.1. The neck is shown as part No. 2 in Figure 1 of this annex.
2.3.2. The neck consists of a head-neck interface piece, a neck-thorax interface piece and a central section that links the two interfaces to one another.
2.3.3. The head-neck interface piece (part No. 2a) and the neck-thorax interface piece (part No. 2c) both consist of two aluminium disks linked together by means of a half spherical screw and eight rubber buffers.
2.3.4. The cylindrical central section (part No. 2b) is made of rubber. At both sides an aluminium disk of the interface pieces is moulded in the rubber part.
2.3.5. The neck is mounted on the neck-bracket, shown as part No. 2d in Figure 1 of this annex. This bracket can optionally be replaced with a lower neck load-cell.
2.3.6. The angle between the two faces of the neck-bracket is 25°. Because the shoulder block is inclined 5° backwards, the resulting angle between the neck and torso is 20°.
2.4. Shoulder
2.4.1. The shoulder is shown as part No. 3 in Figure 1 of this annex.
2.4.2. The shoulder consists of a shoulder box, two clavicles and a shoulder foam cap.
2.4.3. The shoulder block (part No. 3a) consists of an aluminium spacer block, an aluminium plate on top and an aluminium plate on the bottom of the spacer block. Both plates are covered with a polytetrafluoretheen (PTFE)-coating.
2.4.4. The clavicles (part No. 3b), made of cast polyurethane (PU)-resin, are designed to evolve over the spacer block. The clavicles are held back in their neutral position by two elastic cords (part No. 3c) which are clamped to the rear of the shoulder box. The outer edge of both clavicles accommodates a design allowing for standard arm positions.
2.4.5. The shoulder cap (part No. 3d) is made of low-density polyurethane foam and is attached to the shoulder block.
2.5. Thorax
2.5.1. The thorax is shown as part No. 4 in Figure l of this annex.
2.5.2. The thorax consists of a rigid thoracic spine box and three identical rib modules.
2.5.3. The thoracic spine box (part No. 4a) is made of steel. On the rear surface a steel spacer and curved, polyurethane (PU)-resin, back plate is mounted (part No. 4b).
2.5.4. The top surface of the thoracic spine box is inclined 5° backwards.
2.5.5. At the lower side of the spine box a T12 load cell or load cell replacement (part No. 4j) is mounted.
2.5.6. A rib module (part No. 4c) consists of a steel rib bow covered by a flesh-simulating open-cell polyurethane (PU) foam (part No. 4d), a linear guide system assembly (part No. 4e) linking the rib and spine box together, a hydraulic damper (part No. 4f) and a stiff damper spring (part No. 4g).
2.5.7. The linear guide system (part No. 4e) allows the sensitive rib side of the rib bow (part No. 4d) to deflect with respect to the spine box (part No. 4a) and the non-sensitive side. The guide system assembly is equipped with linear needle bearings.
2.5.8. A tuning spring is located in the guide system assembly (part No. 4h).
2.5.9. A rib displacement transducer (part No. 4i) can be installed on the spine box mounted part of guide system (part No. 4e) and connected to the outer end of the guide system at the sensitive side of the rib.
2.6. Arms
2.6.1. The arms are shown as part No. 5 in Figure 1 of this annex.
2.6.2. The arms have a plastic skeleton covered by a polyurethane (PU) flesh representation with a polyvinylchloride (PVC) skin. The flesh representation consists of a high density polyurethane (PU) moulding upper part and a polyurethane (PU) foam lower part.
2.6.3. The shoulder-arm joint allows for discrete arm positions at 0, 40 and 90° setting with respect to the torso axis.
2.6.4. The shoulder-arm joint allows for a flexion-extension rotation only.
2.7. Lumbar spine
2.7.1. The lumbar spine is shown as part No. 6 in Figure 1 of this annex.
2.7.2. The lumbar spine consists of a solid rubber cylinder with two steel interface plates at each end, and a steel cable inside the cylinder.
2.8. Abdomen
2.8.1. The abdomen is shown as part No. 7 in Figure 1 of this annex.
2.8.2. The abdomen consists of a rigid central part and a foam covering.
2.8.3. The central part of the abdomen is a metal casting (part No. 7A). A cover plate is mounted on top of the casting.
2.8.4. The covering (part No. 7b) is made of polyurethane (PU) foam. A curved slab of rubber filled with lead-pellets is integrated in the foam covering at both sides.
2.8.5. Between the foam covering and the rigid casting at each side of the abdomen, either three force transducers (part No. 7c) or three non-measuring replacement units can be mounted.
2.9. Pelvis
2.9.1. The pelvis is shown as part No. 8 in Figure 1 of this annex.
2.9.2. The pelvis consists of a sacrum block, two iliac wings, two hip joints assemblies and a flesh simulating foam covering.
2.9.3. The sacrum (part No. 8a) consists of a mass tuned metal block and a metal plate mounted on top of this block. In the aft side of the block is a cavity to facilitate the application of instrumentation.
2.9.4. The iliac wings (part No. 8b) are made of polyurethane (PU)-resin.
2.9.5. The hip joints assemblies (part No. 8c) are made of steel parts. They consist of an upper femur bracket and a ball joint connected to an axle passing through the dummy’s H-point.
2.9.6. The flesh system (part No. 8d) is made of a polyvinlychloride (PVC) skin filled with polyurethane (PU) foam. At the H-point location the skin is replaced by open-cell polyurethane (PU) foam block (part No. 8e), backed up with a steel plate fixed on the iliac wing by an axle support going through the ball joint.
2.9.7. The iliac wings are attached to the sacrum block at the aft side and linked together at the pubic symphysis location by a force transducer (part No. 8f) or a replacement transducer.
2.10. Legs
2.11. The legs are shown as part No. 9 in Figure 1 of this annex.
2.11.1. The legs consist of a metal skeleton covered by a flesh-stimulating polyurethane (PU) foam with a polyvinlychloride (PVC) skin.
2.11.2. A high-density polyurethane (PU) moulding with a polyvinlychloride (PVC) skin represents the thigh flesh of the upper legs.
2.11.3. The knee and ankle joint allow for a flexion/extension rotation only.
2.12. Suit
2.12.1. The suit is not shown in Figure 1 of this annex.
2.12.2. The suit is made of rubber and covers the shoulders, thorax, upper part of the arms, the abdomen and lumbar spine, the upper part of the pelvis.
Figure 1
Construction of side impact dummy

Table 1
Side Impact Dummy Components (See Figure 1)
Part | No. | Description | Number |
1 | | Head | 1 | |
2 | | Neck | 1 | |
| 2a | | Head-neck interface | | 1 |
| 2b | | Central section | | 1 |
| 2c | | Neck-thorax interface | | 1 |
| 2d | | Neck-bracket | | 1 |
3 | | Shoulder | 1 | |
| 3a | | Shoulder box | | 1 |
| 3b | | Clavicles | | 2 |
| 3c | | Elastic cord | | 2 |
| 3d | | Shoulder foam cap | | 1 |
4 | | Thorax | 1 | |
| 4a | | Thoracic spine | | 1 |
| 4b | | Back plate (curved) | | 1 |
| 4c | | Rib module | | 3 |
| 4d | | Rib bow covered with flesh | | 3 |
| 4e | | Piston-cylinder assembly | | 3 |
| 4f | | Damper | | 3 |
| 4g | | Stiff damper spring | | 3 |
| 4h | | Tuning spring | | 3 |
| 4i | | Displacement transducer | | 3 |
| 4j | | T12 load cell or load cell replacement | | 1 |
5 | | Arm | 2 | |
6 | | Lumbar spine | 1 | |
7 | | Abdomen | 1 | |
| 7a | | Central casting | | 1 |
| 7b | | Flesh covering | | 1 |
| 7c | | Force transducer | | 3 |
8 | | Pelvis | 1 | |
| 8a | | Sacrum block | | 1 |
| 8b | | Iliac wings | | 2 |
| 8c | | Hip joint assembly | | 2 |
| 8d | | Flesh covering | | 1 |
| 8e | | H-point foam block | | 2 |
| 8f | | Force transducer or replacement | | 1 |
9 | | Leg | 2 | |
10 | | Suit | 1 | |
3. Assembly of the dummy
3.1. Head-neck
3.1.1. The required torque on the half-spherical screws for assembly of the neck is 10 Nm.
3.1.2. The head-upper neck load cell assembly is mounted to the head-neck interface plate of the neck by four screws.
3.1.3. The neck-thorax interface plate of the neck is mounted to the neck-bracket by four screws.
3.2. Neck-shoulder-thorax
3.2.1. The neck-bracket is mounted to the shoulder block by four screws.
3.2.2. The shoulder-block is mounted to the top-surface of the thoracic spine box by three screws.
3.3. Shoulder-arm
3.3.1. The arms are mounted to the shoulder clavicles by means of a screw and an axial bearing. The screw shall be tightened to obtain a 1 - 2 g holding force of the arm on its pivot.
3.4. Thorax-lumbar spine-abdomen
3.4.1. The mounting direction of rib modules in the thorax shall be adapted to the required impact side.
3.4.2. A lumbar spine adapter is mounted to the T12 load cell or load cell replacement at the lower part of the thoracic spine by two screws.
3.4.3. The lumbar spine adapter is mounted to the top of the lumbar spine with four screws.
3.4.4. The mounting flange of the central abdominal casting is clamped between the lumbar spine adapter and the lumbar spine top plate.
3.4.5. The location of the abdominal force transducers shall be adapted to the required impact side.
3.5. Lumbar spine-pelvis-legs
3.5.1. The lumbar spine is mounted to the sacrum block cover plate by three screws. In case of using the lower lumbar spine load cell four screws are used.
3.5.2. The lumbar spine bottom plate is mounted to the sacrum block of the pelvis by three screws.
3.5.3. The legs are mounted to the upper femur bracket of the pelvis hip joint assembly by a screw.
3.5.4. The knee and ankle links in the legs can be adjusted to obtain a 1 - 2 g holding force.
4. Main characteristics
4.1. Mass
4.1.1. The masses of the main dummy components are presented in table 2 of this annex.
Table 2
Dummy Component Masses
Component
(body part) | Mass
(kg) | Tolerance
± (kg) | Principle contents |
Head | 4.0 | 0.2 | Complete head assembly including tri-axial accelerometer and upper neck load cell or replacement |
Neck | 1.0 | 0.05 | Neck, not including neck bracket |
Thorax | 22.4 | 1.0 | Neck bracket, shoulder cap, shoulders assembly, arm attachment bolts, spine box, torso back plate, rib modules, rib deflection transducers, torso back plate load cell or replacement, T12–load cell or replacement, abdomen central casting, abdominal force transducers, 2/3 of suit |
Arm (each) | 1.3 | 0.1 | Upper arm, including arm positioning plate (each) |
Abdomen and lumbar spine | 5.0 | 0.25 | Abdomen flesh covering and lumbar spine |
Pelvis | 12.0 | 0.6 | Sacrum block, lumbar spine mounting plate, hip ball joints, upper femur brackets, iliac wings, pubic force transducer, pelvis flesh covering, 1/3 of suit |
Leg (each) | 12.7 | 0.6 | Foot, lower and upper leg and flesh as far as junction with upper femur (each) |
Total dummy | 72.0 | 1.2 | |
4.2. Principal dimensions
4.2.1. The principal dimensions of the side impact dummy (including the suit), based on Figure 2 of this annex, are given in Table 3 of this annex.
The dimensions are measured without suit
Figure 2
Measurements for principal dummy dimensions
(See Table 3)
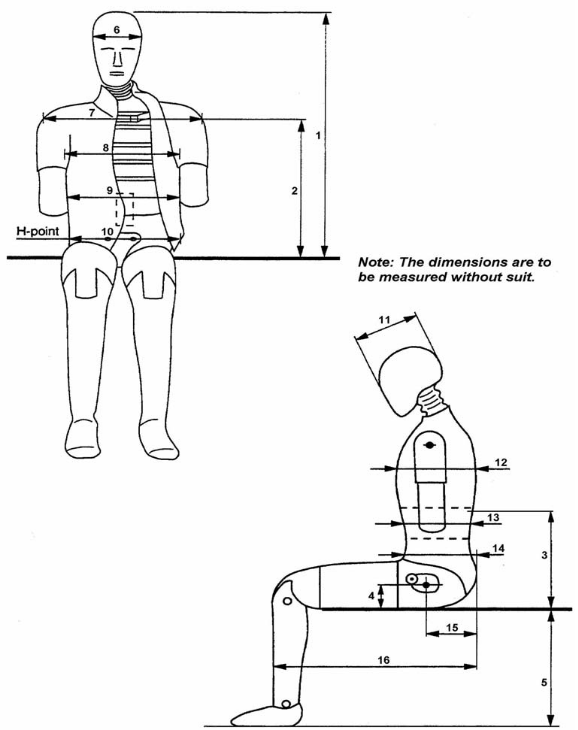
Table 3
Principal Dummy Dimensions
No. | Parameter | Dimension (mm) |
1 | Sitting height | 909 ± 9 |
2 | Seat to shoulder joint | 565 ± 7 |
3 | Seat to lower face of thoracic spine box | 351 ± 5 |
4 | Seat to hip joint (centre of bolt) | 100 ± 3 |
5 | Sole to seat, sitting | 442 ± 9 |
6 | Head width | 155 ± 3 |
7 | Shoulder/arm width | 470 ± 9 |
8 | Thorax width | 327 ± 5 |
9 | Abdomen width | 290 ± 5 |
10 | Pelvis width | 355 ± 5 |
11 | Head depth | 201 ± 5 |
12 | Thorax depth | 276 ± 5 |
13 | Abdomen depth | 199 ± 5 |
14 | Pelvis depth | 240 ± 5 |
15 | Back of buttocks to hip joint (centre of bolt) | 155 ± 5 |
16 | Back of buttocks to front knee | 606 ± 9 |
5. Certification of the dummy
5.1. Impact side
5.1.1. Depending on the vehicle side to be impacted, dummy parts should be certified on the left hand side or right hand side.
5.1.2. The configurations of the dummy with regards to the mounting direction of the rib modules and the location of the abdominal force transducers shall be adapted to the required impact side.
5.2. Instrumentation
5.2.1. All instrumentation shall be calibrated in compliance with the requirements of the documentation specified in paragraph 1.1. of this annex.
5.2.2. All instrumentation channels shall comply with ISO 6487:2000 or SAE J211 (March 1995) data channel recording specification.
5.2.3. The minimum number of channels required to comply with this regulation is ten:
Head accelerations (3),
Thorax rib displacements (3),
Abdomen loads (3); and
Pubic symphysis load (1).
5.2.4. Additionally a number of optional instrumentation channels (38) are available:
Upper neck loads (6),
Lower neck loads (6),
Clavicle loads (3),
Torso back plate loads (4),
T1 accelerations (3),
T12 accelerations (3),
Rib accelerations (6, two on each rib),
T12 spine loads (4),
Lower lumbar loads (3),
Pelvis accelerations (3); and
Femur loads (6).
Additional four position indicator channels are optionally available:
Thorax rotations (2); and
Pelvis rotations (2)
5.3. Visual check
5.3.1. All dummy parts should be visually checked for damage and if necessary replaced before the certification test.
5.4. General test set-up
5.4.1. Figure 3 of this annex shows the test set-up for all certification tests on the side impact dummy.
5.4.2. The certification test set-up arrangements and testing procedures shall be in accordance with the specification and requirements of the documentation specified in paragraph 1.1.
5.4.3. The tests on the head, neck, thorax and lumbar spine are carried out on sub-assemblies of the dummy.
5.4.4. The tests on the shoulder, abdomen and pelvis are performed with the complete dummy (without suit, shoes and underwear). In these tests the dummy is seated on a flat surface with two sheets of less than or equal to 2 mm thick polytetrafluoretheen (PTFE), placed between the dummy and the flat surface.
5.4.5. All parts to be certified should be kept in the test room for a period of at least four hours at a temperature between and including 18 and 22 °C and a relative humidity between and including 10 and 70 per cent prior to a test.
5.4.6. The time between two certification tests on the same part should be at least 30 minutes.
5.5. Head
5.5.1. The head sub assembly, including the upper neck load cell replacement, is certified in a drop test from 200 ± 1 mm onto a flat, rigid impact surface.
5.5.2. The angle between the impact surface and the mid-sagittal plane of the head is 35 ± 1° allowing an impact to the upper part of the head side (this can be realised with a sling harness or a head drop support bracket with a mass of 0.075 ± 0.005 kg.).
5.5.3. The peak resultant head acceleration, filtered using ISO 6487:2000 CFC 1000, should be between and including 100 g and 150 g.
5.5.4. The head performance can be adjusted to meet the requirement by altering the friction characteristics of the skin-skull interface (e.g. by lubrication with talcum powder or polytetrafluoretheen (PTFE) spray).
5.6. Neck
5.6.1. The head-neck interface of the neck is mounted to a special certification head-form with a mass of 3.9 ± 0.05 kg (see Figure 6), with the help of a 12 mm thick interface plate with a mass of 0.205 ± 0.05 kg.
5.6.2. The head-form and neck are mounted upside-down to the bottom of a neck- pendulum[10] allowing a lateral motion of the system.
5.6.3. The neck-pendulum is equipped with a uni-axial accelerometer according to the neck pendulum specification (see Figure 5).
5.6.4. The neck-pendulum should be allowed to fall freely from a height chosen to achieve an impact velocity of 3.4 ± 0.1 m/s measured at the pendulum accelerometer location.
5.6.5. The neck-pendulum is decelerated from impact velocity to zero by an appropriate device,[11] as described in the neck pendulum specification (see Figure 5), resulting in a velocity change - time history inside the corridor specified in Figure 7 and Table 4 of this annex. All channels have to be recorded according to the ISO 6487:2000 or SAE J211 (March 1995) data channel recording specification and filtered digitally using ISO 6487:2000 CFC 180 or SAE J211:1995 CFC 180. The pendulum deceleration has to be filtered using ISO 6487:2000 CFC 60 OR SAE J211:1995 CFC 60.
Table 4
Pendulum velocity change - time corridor for neck certification test
Upper boundary
time (s) | Velocity (m/s) | Lower boundary
time (s) | Velocity (m/s) |
0.001 | 0.0 | 0 | -0.05 |
0.003 | -0.25 | 0.0025 | -0.375 |
0.014 | -3.2 | 0.0135 | -3.7 |
| | 0.017 | -3.7 |
5.6.6. The maximum head-form flexion angle relative to the pendulum (Angle dθA + dθC in Figure 6) should be between and including 49.0 and 59.0 degrees and should occur between and including 54.0 and 66.0 ms.
5.6.7. The maximum head-form centre of gravity displacements measured in angle dθA and dθB (see Figure 6) should be: Fore pendulum base angle dθA between and including 32.0 and 37.0° occurring between and including 53.0 and 63.0 m/s and aft pendulum base angle dθB between and including 0.81*(angle dθA) +1.75 and 0.81*(angle dθA) +4.25° occurring between and including 54.0 and 64.0 m/s.
5.6.8. The neck performance can be adjusted by replacing the eight circular section buffers with buffers of another shore hardness.
5.7. Shoulder
5.7.1. The length of the elastic cord should be adjusted so that a force between and including 27.5 and 32.5 N applied in a forward direction 4 ± 1 mm from the outer edge of the clavicle in the same plane as the clavicle movement, is required to move the clavicle forward.
5.7.2. The dummy is seated on a flat, horizontal, rigid surface with no back support. The thorax is positioned vertically and the arms should be set at an angle of 40 ± 2° forward to the vertical. The legs are positioned horizontally.
5.7.3. The impactor is a pendulum with a mass of 23.4 ± 0.2 kg and diameter of 152.4 ± 0.25 mm with an edge radius of 12.7 mm.[12] The impactor is suspended from rigid hinges by four wires with the centre line of the impactor at least 3.5 m below the rigid hinges (see Figure 4).
5.7.4. The impactor is equipped with an accelerometer sensitive in the direction of impact and located on the impactor axis.
5.7.5. The impactor should freely swing onto the shoulder of the dummy with an impact velocity of 4.3 ± 0.1 m/s.
5.7.6. The impact direction is perpendicular to the anterior-posterior axis of the dummy and the axis of the impactor coincides with the axis of the upper arm pivot.
5.7.7. The peak acceleration of the impactor, filtered using ISO 6487:2000 CFC 180, should be between and including 7.5 and 10.5 g.
5.8. Arms
5.8.1. No dynamic certification procedure is defined for the arms.
5.9. Thorax
5.9.1. Each rib module is certified separately.
5.9.2. The rib module is positioned vertically in a drop test rig and the rib cylinder is clamped rigidly onto the rig.
5.9.3. The impactor is a free fall mass of 7.78 ± 0.01 kg with a flat face and a diameter of 150 ± 2 mm.
5.9.4. The centre line of the impactor should be aligned with the centre line of the rib’s guide system.
5.9.5. The impact severity is specified by the drop heights of 815, 204 and 459 mm. These drop heights result in velocities of approximately 4, 2 and 3 m/s respectively. Impact drop heights should be applied with an accuracy of 1 per cent.
5.9.6. The rib displacement should be measured, for instance using the rib’s own displacement transducer.
5.9.7. The rib certification requirements are given in Table 5 of this annex.
5.9.8. The performance of the rib module can be adjusted by replacing the tuning spring inside the cylinder with one of a different stiffness.
Table 5
Requirements for full rib module certification
Test sequence | Drop height
(accuracy 1%)(mm) | Minimum displacement
(mm) | Maximum displacement
(mm) |
1 | 815 | 46.0 | 51.0 |
2 | 204 | 23.5 | 27.5 |
3 | 459 | 36.0 | 40.0 |
5.10. Lumbar spine
5.10.1. The lumbar spine is mounted to the special certification head-form with a mass of 3.9 ± 0.05 kg (see Figure 6), with the help of a 12 mm thick interface plate with a mass of 0.205 ± 0.05 kg.
5.10.2. The head-form and lumbar spine are mounted upside-down to the bottom of a neck-pendulum[5] allowing a lateral motion of the system.
5.10.3. The neck-pendulum is equipped with an uni-axial accelerometer according to the neck-pendulum specification (see Figure 5).
5.10.4. The neck-pendulum should be allowed to fall freely from a height chosen to achieve an impact velocity of 6.05 ± 0.1 m/s measured at the pendulum accelerometer location.
5.10.5. The neck-pendulum is decelerated from impact velocity to zero by an appropriate device,[6] as described in the neck pendulum specification (see Figure 5), resulting in a velocity change - time history inside the corridor specified in Figure 8 and Table 6 of this annex. All channels have to be recorded according to the ISO 6487-2000 or SAE J211 (March 1995) data channel recording specification and filtered digitally using ISO 6487:2000 CFC 180 or SAE J211:1995 CFC 180. The pendulum deceleration has to be filtered using ISO 6487:2000 CFC 60 or SAE J211:1995 CFC 60.
Table 6
Pendulum Velocity Change - Time Corridor for Lumbar Spine Certification Test
Upper boundary
time [s] | Velocity [m/s] | Lower boundary
time [s] | Velocity [m/s] |
0.001 | 0.0 | 0 | -0.05 |
0.0037 | -0.2397 | 0.0027 | -0.425 |
0.027 | -5.8 | 0.0245 | -6.5 |
| | 0.03 | -6.5 |
The maximum head-form flexion angle relative to the pendulum
(Angle dθA + dθC in Figure 6)) should be between and including 45.0 and 55.0° and should occur between and including 39.0 and 53.0 m/s.
5.10.7. The maximum head-form centre of gravity displacements measured in angle dθA and dθB (see Figure 6) should be: Fore pendulum base angle dθA between and including 31.0 and 35.0° occurring between and including 44.0 and 52.0 m/s and aft pendulum base angle dθB between and including 0.8*(angle dθA) + 2.00 and 0.8* (angle dθA) + 4.50° occurring between and including 44.0 and 52.0 m/s.
5.10.8. The performance of the lumbar spine can be adjusted by changing tension in the spine cable.
5.11. Abdomen
5.11.1. The dummy is seated on a flat, horizontal, rigid surface with no back support. The thorax is positioned vertically, while the arms and legs are positioned horizontally.
5.11.2. The impactor is a pendulum with a mass of 23.4 ± 0.2 kg and diameter of 152.4 ± 0.25 mm with an edge radius of 12.7 mm.[7] The impactor is suspended from rigid hinges by eight wires with the centre line of the impactor at least 3.5 m below the rigid hinges (see Figure 4).
5.11.3. The impactor is equipped with an accelerometer sensitive in the direction of impact and located on the impactor axis.
5.11.4. The pendulum is equipped with a horizontal "arm rest" impactor face of 1.0 ± 0.01 kg. The total mass of the impactor with the arm rest face is 24.4 ± 0.21 kg. The rigid "arm rest" is 70 ± 1 mm high, 150 ± 1 mm wide and should be allowed to penetrate at least 60 mm into the abdomen. The centreline of the pendulum coincides with the centre of the "arm rest".
5.11.5. The impactor should freely swing onto the abdomen of the dummy with an impact velocity of 4.0 ± 0.1 m/s.
5.11.6. The impact direction is perpendicular to the anterior-posterior axis of the dummy and the axis of the impactor is aligned with the centre of the middle abdominal force transducer.
5.11.7. The peak force of the impactor, obtained from the impactor acceleration filtered using ISO 6487:2000 CFC 180 and multiplied by the impactor/armrest mass, should be between and including 4.0 and 4.8 kN, and occur between and including 10.6 and 13.0 m/s.
5.11.8. The force-time histories measured by the three abdominal force transducers must be summed and filtered using ISO 6487:2000 CFC 600. The peak force of this sum should be between and including 2.2 and 2.7 kN, and occur between and including 10.0 and 12.3 m/s.
5.12. Pelvis
5.12.1. The dummy is seated on a flat, horizontal, rigid surface with no back support. The thorax is positioned vertically while the arms and legs are positioned horizontally.
5.12.2. The impactor is a pendulum with a mass of 23.4 ± 0.2 kg and diameter of 152.4 ± 0.25 mm with an edge radius of 12.7 mm.[8] The impactor is suspended from rigid hinges by eight wires with the centre line of the impactor at least 3.5 m below the rigid hinges (see Figure 4).
5.12.3. The impactor is equipped with an accelerometer sensitive in the direction of impact and located on the impactor axis.
5.12.4. The impactor should freely swing onto the pelvis of the dummy with an impact velocity of 4.3 ± 0.1 m/s.
5.12.5. The impact direction is perpendicular to the anterior-posterior axis of the dummy and the axis of the impactor is aligned with the centre of the H-point back plate.
5.12.6. The peak force of the impactor, obtained from the impactor acceleration filtered using ISO 6487:2000 CFC 180 and multiplied by the impactor mass, should be between and including 4.4 and 5.4 kN, and occur between and including 10.3 and 15.5 m/s.
5.12.7. The pubic symphisis force, filtered using ISO 6487:2000 CFC 600, should be between and including 1.04 and 1.64 kN and occur between and including 9.9 and 15.9 m/s.
5.13. Legs
5.13.1. No dynamic certification procedure is defined for the legs
Figure 3
Overview of the side impact dummy certification test set-up
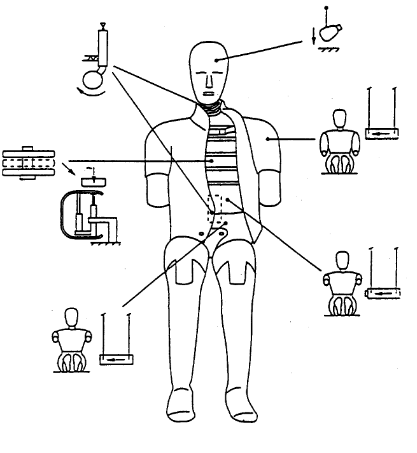
Figure 4
23,4 kg Pendulum impactor suspension
Left: Four wires suspension (cross wires removed)
Right: Eight wires suspension

Figure 5
Pendulum deceleration-time corridor for neck certification test

Figure 6
Pendulum deceleration-time corridor for lumbar spine certification test

Figure 7
Pendulum velocity change - time corridor for neck certification test
![Figure 7 - Pendulum velocity change - time corridor for neck certification test
Figure is a graph showing the values for a Pendulum velocity change-time corridor for neck certification test. The x-axis measurement in Time [ms] and the y-axis Velocity [m/s]](image.039.png)
Figure 8
Pendulum velocity change - time corridor for lumbar spine certification test
![Figure 8 - Pendulum velocity change - time corridor for lumbar spine certification test
Figure is a graph showing the values for a Pendulum velocity change-time corridor for lumbar spine certification test. The x-axis measurement in Time [ms] and the y-axis Velocity [m/s]](image.040.png)
Annex 7
Installation of the side impact dummy
1. General
1.1. The side impact dummy as described in Annex 6 to this Regulation is to be used according the following installation procedure.
2. Installation
2.1. Adjust the knee and ankle joints so that they just support the lower leg and the foot when extended horizontally (1 to 2 g - adjustment).
2.2. Check if the dummy is adapted to the desired impact direction.
2.3. The dummy shall be clothed in a form-fitting cotton stretch mid-calf length pant and may be clothed in a form-fitting cotton stretch shirt with short sleeves.
2.4. Each foot shall be equipped with a shoe.
2.5. Place the dummy in the outboard front seat of the impacted side as described in the side impact test procedure specification.
2.6. The plane of symmetry of the dummy shall coincide with the vertical median plane of the specified seating position.
2.7. The pelvis of the dummy shall be positioned such that a lateral line passing through the dummy H-points is perpendicular to the longitudinal centre plane of the seat. The line through the dummy H-points shall be horizontal with a maximum inclination of ±2°.[13]
The correct position of the dummy pelvis can be checked relative to the H-point of the H-point Manikin by using the M3 holes in the H-point back plates at each side of the ES-2 pelvis. The M3 holes are indicated with "Hm". The "Hm" position should be in a circle with a radius of 10 mm round the H-point of the H-point Manikin.
The correct position of the dummy pelvis
2.8. The upper torso shall be bent forward and then laid back firmly against the seat back (see note 1). The shoulders of the dummy shall be set fully rearward.
2.9. Irrespective of the seating position of the dummy, the angle between the upper arm and the torso arm reference line on each side shall be 40° ± 5°. The torso arm reference line is defined as the intersection of the plane tangential to the front surface of the ribs and the longitudinal vertical plane of the dummy containing the arm.
2.10. For the driver’s seating position, without inducing pelvis or torso movement, place the right foot of the dummy on the non-depressed accelerator pedal with the heel resting as far forward as possible on the floor-pan. Set the left foot perpendicular to the lower leg with the heel resting on the floor-pan in the same lateral line as the right heel. Set the knees of the dummy such that their outside surfaces are 150 ± 10 mm from the plane of symmetry of the dummy. If possible within these constraints place the thighs of the dummy in contact with the seat cushion.
2.11. For other seating positions, without inducing pelvis or torso movement, place the heels of the dummy as far forward as possible on the floor-pan without compressing the seat cushion more than the compression due to the weight of the leg. Set the knees of the dummy such that their outside surfaces are 150 ± 10 mm from the plane of symmetry of the dummy.
Annex 8
Partial test
1. Purpose
The purpose of these tests is to verify whether the modified vehicle presents at least the same (or better) energy absorption characteristics than the vehicle type approved under this Regulation.
2. Procedures and installations
2.1. Reference tests
2.1.1. Using the initial padding materials tested during the approval of the vehicle, mounted in a new lateral structure of the vehicle to be approved, two dynamic tests, utilizing two different impactors shall be carried out (Figure 1).
2.1.1.1. The head form impactor, defined in paragraph 3.1.1. below, shall hit at 24.1 km/h, in the area impacted for the EUROSID head during the approval of the vehicle. Test result shall be recorded, and the HPC calculated. However, this test shall not be carried out when, during the tests described in Annex 4 of this Regulation: where there has been no head contact, or when the head contacted the window glazing only, provided that the window glazing is not laminated glass.
2.1.1.2. The body block impactor, defined in paragraph 3.2.1. below, shall hit at 24.1 km/h in the lateral area impacted by the EUROSID shoulder, arm and thorax, during the approval of the vehicle. Test result shall be recorded, and the HPC calculated.
2.2. Approval test
2.2.1. Using the new padding materials, seat, etc. presented for the approval extension, and mounted in a new lateral structure of the vehicle, tests specified in paragraphs 2.1.1.1. and 2.1.1.2. above, shall be repeated, the new results recorded, and their HPC calculated.
2.2.1.1. If the HPC calculated from the results of both approval tests are lower than the HPC obtained during the reference tests (carried out using the original type approved padding materials or seats), the extension shall be granted.
2.2.1.2. If the new HPC are greater than the HPC obtained during the reference tests, a new full scale test (using the proposed padding/seats/etc.) shall be carried out.
3. Test equipment
3.1. Head form impactor (Figure 2)
3.1.1. This apparatus consists of a fully guided linear impactor, rigid, with a mass of 6.8 kg. Its impact surface is hemispherical with a diameter of 165 mm.
3.1.2. The head form shall be fitted with two accelerometers and a speed-measuring device, all capable of measuring values in the impact direction.
3.2. Body block impactor (Figure 3)
3.2.1. This apparatus consists of a fully guided linear impactor, rigid, with a mass of 30 kg. Its dimensions and transversal section is presented in Figure 3.
3.2.2. The body block shall be fitted with two accelerometers and a speed-measuring device, all capable of measuring values in the impact direction.
Annex 9
Test procedures for the vehicles equipped with electric power train
This annex describes test procedures to demonstrate compliance to the electrical safety requirements of paragraph 5.3.7. For example, megohmmeter or oscilloscope measurements are an appropriate alternative to the procedure described below for measuring isolation resistance. In this case it may be necessary to deactivate the on-board isolation resistance monitoring system.
Before the vehicle impact test conducted, the high voltage bus voltage (Ub) (see Figure 1) shall be measured and recorded to confirm that it is within the operating voltage of the vehicle as specified by the vehicle manufacturer.
1. Test setup and equipment
If a high voltage disconnect function is used, measurements are to be taken from both sides of the device performing the disconnect function.
However, if the high voltage disconnect is integral to the REESS or the energy conversion system and the high-voltage bus of the REESS or the energy conversion system is protected according to protection degree IPXXB following the impact test, measurements may only be taken between the device performing the disconnect function and the electrical loads.
The voltmeter used in this test shall measure DC values and have an internal resistance of at least 10 MΩ.
2. The following instructions may be used if voltage is measured.
After the impact test, determine the high voltage bus voltages (Ub, U1, U2) (see Figure 1 below).
The voltage measurement shall be made not earlier than 10 seconds, but, not later than 60 seconds after the impact.
This procedure is not applicable if the test is performed under the condition where the electric power train is not energized.
Figure 1
Measurement of Ub, U1, U2

3. Assessment procedure for low electrical energy
Prior to the impact a switch S1 and a known discharge resistor Re is connected in parallel to the relevant capacitance (ref. Figure 2 below).
(a) Not earlier than 10 seconds and not later than 60 seconds after the impact the switch S1 shall be closed while the voltage Ub and the current Ie are measured and recorded. The product of the voltage Ub and the current Ie shall be integrated over the period of time, starting from the moment when the switch S1 is closed (tc) until the voltage Ub falls below the high voltage threshold of 60 V DC (th). The resulting integration equals the Total Energy (TE) in joules.

(b) When Ub is measured at a point in time between 10 seconds and
60 seconds after the impact and the capacitance of the X-capacitors (Cx) is specified by the manufacturer, Total Energy (TE) shall be calculated according to the following formula:
TE = 0.5 x Cx x Ub2
(c) When U1 and U2 (see Figure 1 above) are measured at a point in time between 10 seconds and 60 seconds after the impact and the capacitances of the Y-capacitors (Cy1, Cy2) are specified by the manufacturer, Total Energy (TEy1, TEy2) shall be calculated according to the following formulas:
TEy1 = 0.5 x Cy1 x U12
TEy2 = 0.5 x Cy2 x U22
This procedure is not applicable if the test is performed under the condition where the electric power train is not energized.
Figure 2
E.g. measurement of high voltage bus energy stored in X-capacitors

4. Physical protection
Following the vehicle impact test any parts surrounding the high voltage components shall be, without the use of tools, opened, disassembled or removed. All remaining surrounding parts shall be considered part of the physical protection.
The jointed test finger described in Figure 3 shall be inserted into any gaps or openings of the physical protection with a test force of 10 N ± 10 per cent for electrical safety assessment. If partial or full penetration into the physical protection by the jointed test finger occurs, the jointed test finger shall be placed in every position as specified below.
Starting from the straight position, both joints of the test finger shall be rotated progressively through an angle of up to 90 degrees with respect to the axis of the adjoining section of the finger and shall be placed in every possible position.
Internal electrical protection barriers are considered part of the enclosure
If appropriate a low-voltage supply (of not less than 40 V and not more than 50 V) in series with a suitable lamp should be connected, between the jointed test finger and high voltage live parts inside the electrical protection barrier or enclosure.
Figure 3
Jointed Test Finger

Material: metal, except where otherwise specified
Linear dimensions in mm.
Tolerances on dimensions without specific tolerance:
(a) on angles: +0/-10 seconds;
(b) on linear dimensions:
(i) up to 25 mm: +0/-0.05;
(ii) over 25 mm: ±0.2.
Both joints shall permit movement in the same plane and the same direction through an angle of 90° with a 0 to +10° tolerance.
The requirements of paragraph 5.3.7.1.3. of this Regulation are met if the jointed test finger described in Figure 3, is unable to contact high voltage live parts.
If necessary a mirror or a fiberscope may be used in order to inspect whether the jointed test finger touches the high voltage buses.
If this requirement is verified by a signal circuit between the jointed test finger and high voltage live parts, the lamp shall not light.
4.1. Test method for measuring electric resistance:
(a) Test method using a resistance tester.
The resistance tester is connected to the measuring points (typically, electrical chassis and electro conductive enclosure/electrical protection barrier) and the resistance is measured using a resistance tester that meets the specification that follows:
(i) Resistance tester: Measurement current at least 0.2 A;
(ii) Resolution: 0.01 Ω or less;
(iii) The resistance R shall be less than 0.1 Ω.
(b) Test method using DC power supply, voltmeter and ammeter.
The DC power supply, voltmeter and ammeter are connected to the measuring points (Typically, electrical chassis and electro conductive enclosure/electrical protection barrier).
The voltage of the DC power supply is adjusted so that the current flow becomes at least 0.2 A.
The current "I" and the voltage "U" are measured.
The resistance "R" is calculated according to the following formula:
R = U / I
The resistance R shall be less than 0.1 Ω.
Note: If lead wires are used for voltage and current measurement, each lead wire shall be independently connected to the electrical protection barrier/enclosure/electrical chassis. Terminal can be common for voltage measurement and current measurement.
Example of the test method using DC power supply, voltmeter and ammeter is shown below.
Figure 4
Example of test method using DC power supply

5. Isolation resistance
5.1. General.
The isolation resistance for each high voltage bus of the vehicle is measured or shall be determined by calculating the measurement values of each part or component unit of a high voltage bus.
All measurements for calculating voltage(s) and electrical isolation are made after a minimum of 10 s after the impact.
5.2. Measurement method.
The isolation resistance measurement is conducted by selecting an appropriate measurement method from among those listed in paragraphs 5.2.1. to 5.2.2. of this Annex, depending on the electrical charge of the live parts or the isolation resistance.
The range of the electrical circuit to be measured is clarified in advance, using electrical circuit diagrams. If the high voltage buses are conductively isolated from each other, isolation resistance shall be measured for each electrical circuit.
Moreover, modifications necessary for measuring the isolation resistance may be carried out, such as removal of the cover in order to reach the live parts, drawing of measurement lines and change in software.
In cases where the measured values are not stable due to the operation of the on-board isolation resistance monitoring system, necessary modifications for conducting the measurement may be carried out by stopping the operation of the device concerned or by removing it. Furthermore, when the device is removed, a set of drawings will be used to prove that the isolation resistance between the live parts and the electrical chassis remains unchanged.
These modifications shall not influence the test results.
Utmost care shall be exercised to avoid short circuit and electric shock since this confirmation might require direct operations of the high-voltage circuit.
5.2.1. Measurement method using DC voltage from external sources.
5.2.1.1. Measurement instrument.
An isolation resistance test instrument capable of applying a DC voltage higher than the working voltage of the high voltage bus shall be used.
5.2.1.2. Measurement method.
An isolation resistance test instrument is connected between the live parts and the electrical chassis. The isolation resistance is subsequently measured by applying a DC voltage at least half of the working voltage of the high voltage bus.
If the system has several voltage ranges (e.g. because of boost converter) in conductively connected circuit and some of the components cannot withstand the working voltage of the entire circuit, the isolation resistance between those components and the electrical chassis can be measured separately by applying at least half of their own working voltage with those components disconnected.
5.2.2. Measurement method using the vehicle's own REESS as DC voltage source.
5.2.2.1. Test vehicle conditions.
The high voltage-bus is energized by the vehicle's own REESS and/or energy conversion system and the voltage level of the REESS and/or energy conversion system throughout the test shall be at least the nominal operating voltage as specified by the vehicle manufacturer.
5.2.2.2. Measurement instrument.
The voltmeter used in this test shall measure DC values and have an internal resistance of at least 10 MΩ.
5.2.2.3. Measurement method.
5.2.2.3.1. First step.
The voltage is measured as shown in Figure 1 and the high voltage bus voltage (Ub) is recorded. Ub shall be equal to or greater than the nominal operating voltage of the REESS and/or energy conversion system as specified by the vehicle manufacturer.
5.2.2.3.2. Second step.
The voltage (U1) between the negative side of the high voltage bus and the electrical chassis is measured and recorded (see Figure 1).
5.2.2.3.3. Third step.
The voltage (U2) between the positive side of the high voltage bus and the electrical chassis is measured and recorded (see Figure 1).
5.2.2.3.4. Fourth step.
If U1 is greater than or equal to U2, a standard known resistance (Ro) is inserted between the negative side of the high voltage bus and the electrical chassis. With Ro installed, the voltage (U1') between the negative side of the high voltage bus and the electrical chassis is measured (see Figure 5).
The electrical isolation (Ri) is calculated according to the following formula:
Ri = Ro*Ub*(1/U1' – 1/U1)
Figure 5
Measurement of U1’

If U2 is greater than U1, insert a standard known resistance (Ro) between the positive side of the high voltage bus and the electrical chassis. With Ro installed, measure the voltage (U2’) between the positive side of the high voltage bus and the electrical chassis (see Figure 6 below). The electrical isolation (Ri) is calculated according to the following formula:
Ri = Ro*Ub*(1/U2’ – 1/U2)
Figure 6
Measurement of U2’
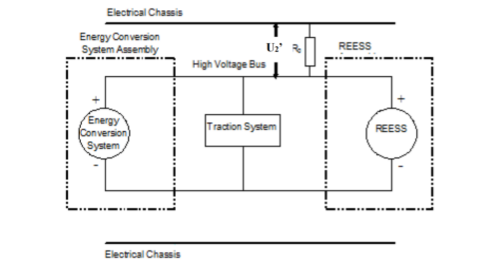
5.2.2.3.5. Fifth step.
The electrical isolation value Ri (in Ω) divided by the working voltage of the high voltage bus (in V) results in the isolation resistance (in Ω/V).
Note: The standard known resistance Ro (in Ω) should be the value of the minimum required isolation resistance (Ω/V) multiplied by the working voltage (V) of the vehicle plus/minus 20 per cent. Ro is not required to be precisely this value since the equations are valid for any Ro; however, a Ro value in this range should provide a good resolution for the voltage measurements.
6. Electrolyte leakage
An appropriate coating, if necessary, may be applied to the physical protection (casing) in order to confirm if there is any electrolyte leakage from the REESS resulting from the test. Unless the manufacturer provides means to differentiate between the leakage of different liquids, all liquid leakage shall be considered as the electrolyte.
7. REESS retention compliance shall be determined by visual inspection.