I, WILLIAM BRUCE BYRON, Director of Aviation Safety, on behalf of CASA, make this instrument under regulation 172.022 of the Civil Aviation Safety Regulations 1998.
[Signed Bruce Byron]
Bruce Byron
Director of Aviation Safety and
Chief Executive Officer
21 March 2006
Manual of Standards Part 172 Amendment (No. 1) 2006
1 Name of instrument
This instrument is the Manual of Standards Part 172 Amendment (No. 1) 2006.
2 Commencement
This instrument commences on the day after it is registered.
3 Amendment of the Manual of Standards Part 172
(1)Schedule 1 amends Manual of Standards Part 172.
(2)Schedule 2 amends Manual of Standards Part 172 as amended by Schedule 1.
Schedule 1 Amendment
(section 3)
[1] Subsection 1.1.7.1
substitute
1.1.7.1Unless otherwise stated, abbreviations in this MOS have the meanings given in the AIP or as follows:
Abbreviation | Meaning |
ADS-B | Automatic dependent surveillance — broadcast |
ADS-C | Automatic dependent surveillance — contract |
HPL | Horizontal protection limit |
NIC | Navigation integrity category |
NUC_P | Navigational uncertainty category — position |
PS | Position symbol |
SIL | Surveillance integrity limit |
[2] Subsection 1.2.1.1
substitute
1.2.1.1 Unless otherwise stated, words in this MOS have the meanings given in the AIP or as follows:
Definition | Meaning |
ADS-C agreement | A reporting plan which establishes the conditions of ADS-C data reporting (i.e. data required by the air traffic services unit and frequency of ADS-C reports which have to be agreed to prior to the provision of air traffic services). |
ATS surveillance service | Term used to indicate an air traffic service provided directly by means of an ATS surveillance system. |
ATS surveillance system | A generic term meaning variously, ADS-B, PSR, SSR or any comparable ground-based system that enables the identification of aircraft. Note A comparable ground-based system is one that has been demonstrated, by comparative assessment or other methodology, to have a level of safety and performance equal to, or better than, monopulse SSR. |
Automatic dependent surveillance — broadcast | A means by which aircraft, aerodrome vehicles and other objects can automatically transmit or receive data such as identification, position and additional data, as appropriate, in a broadcast mode via a data link. |
Automatic dependent surveillance — contract | A means by which the terms of an ADS-C agreement will be exchanged between the ground system and the aircraft, via a data link, specifying under what conditions ADS-C reports would be initiated, and what data would be contained in the reports. |
Flight path monitoring | The use of ATS surveillance systems for the purpose of providing aircraft with information and advice relative to significant deviations from nominal flight path, including deviations from the terms of their air traffic control clearances. Note Some applications may require a specific technology, e.g. radar, to support the function of flight path monitoring. |
Identification | The situation which exists when the position indication of a particular aircraft is seen on a situation display and positively identified by ATC. |
Position indication | The visual indication, in non-symbolic or symbolic form, on a situation display, of the position of an aircraft, aerodrome vehicle or other object. |
Position symbol | The visual indication in symbolic form, on a situation display, of the position of an aircraft, aerodrome vehicle or other object obtained after automatic processing of positional data derived from any source. |
Positive radio fix | (a) An NDB or locator site (when propagation is normal); or (b) A VOR, TACAN site or marker beacon. |
Procedural control | Term used to indicate that information derived from an ATS surveillance system is not required for the provision of air traffic control service. |
Procedural separation | The separation used when providing procedural control. |
PSR blip | The visual indication, in non-symbolic form, on a situation display, of the position of an aircraft obtained by primary radar. |
Radar approach | An approach in which the final approach phase is executed under the direction of a controller using radar. |
Radar clutter | The visual indication on a situation display of unwanted signals. |
Safety case | A safety case provides documented evidence and argument that a service or facility, or a proposed change to the design of a service or facility, meets safety objectives or levels for the service or facility. |
Situation display | An electronic display depicting the position and movement of aircraft and other information as required. |
SSR response | The visual indication, in non-symbolic form, on a situation display, of a response from an SSR transponder in reply to an interrogation. |
Vectoring | Provision of navigational guidance to aircraft in the form of specific headings, based on the use of an ATS surveillance system. |
[3] Section 10.2, heading
substitute
Section 10.2 ATS surveillance systems
[4] Subsection 10.2.1
substitute
10.2.1 Use of ADS-B surveillance
10.2.1.1 ADS-B may be used alone, or in combination with radar, for the provision of air traffic services if:
(a) reliable ADS-B coverage exists in the area; and
(b) identification of ADS-B equipped aircraft is established and maintained; and
(c) the ADS-B data indicates that:
(i) the HPL does not exceed 0.5 NM; and
(ii) the probability of the HPL information being erroneous is less than
1 × 10-5 per flight hour.
Note These values are equivalent to a NUC_P of 5 as defined in ICAO Annex 10, Volume III, Part 1, Chapter 5, Appendix, or a NIC of 6 and a SIL of 2 as defined in RTCA DO-260A.
10.2.2A Operation of ADS-B transmitters
10.2.2A.1 If the situation display shows that the aircraft identification transmitted by an ADS‑B‑equipped aircraft is different from that expected from the aircraft, ATC must ask the pilot to confirm aircraft identification.
10.2.2A.2 If, after a pilot has been instructed to operate the aircraft’s ADS-B transmitter on an assigned aircraft identification or to change call sign, the aircraft identification shown on the situation display is different from that assigned to the aircraft, ATC must ask the pilot to re-enter the assigned aircraft identification.
10.2.2A.3 If the identification of an aircraft as shown on the situation display is different from that assigned to the aircraft, and a request under subsection 10.2.2.2 has not resolved the discrepancy, ATC must ask the pilot to confirm that the correct aircraft identification has been selected.
10.2.2A.4 If the discrepancy continues following confirmation by the pilot that the correct aircraft identification has been set on the ADS-B identification feature, ATC must:
(a) tell the pilot of the persistent discrepancy; and
(b) if possible, correct the label showing the aircraft identification on the situation display; and
(c) tell the next control position and any other interested unit using ADS-B for identification purposes of the erroneous aircraft identification transmitted by the aircraft.
10.2.3A Verification of level information
10.2.3A.1 The tolerance value for pressure altitude-derived level information displayed to the controller is ±200 ft. Geometric height information must not be used for separation.
10.2.3A.2 ATC must verify displayed pressure altitude-derived level information:
(a) on initial contact with an aircraft or, if this is not feasible, as soon as possible after initial contact; and
(b) by simultaneous comparison with:
(i) altimeter-derived level information received from the same aircraft by radiotelephony; or
(ii) at an aerodrome — the aerodrome elevation during the take-off roll, if the level information subsequently indicates a positive climb after take-off.
10.2.3A.3 If aircraft pressure altitude-derived level information is within the approved tolerance value, the pilot need not be advised of the verification. Geometric height information must not be used to determine if altitude differences exist.
10.2.3A.4 If the displayed level information is not within the approved tolerance value or if a discrepancy greater than the approved tolerance value is detected after verification, ATC must tell the pilot of this and ask the pilot to check the pressure setting and confirm the aircraft’s level.
10.2.3A.5 If the discrepancy continues to exist after confirmation of the correct pressure setting, ATC must:
(a) ask the pilot to stop Mode C or ADS-B altitude data transmission, if this does not cause the loss of position and identity information, and tell the next control position or ATC unit for the aircraft of the action taken; or
(b) tell the pilot of the discrepancy and ask that the operation continue in order to prevent loss of position and identity information of the aircraft, if possible, override the label displayed level information with the reported level and tell the next control position or ATC unit for the aircraft of the action taken.
10.2.4A Determination of level occupancy using ATS surveillance system-derived level information
10.2.4A.1 Aircraft maintaining a level. An aircraft is taken to be maintaining its assigned level as long as the pressure altitude-derived level information indicates that it is within ±200 ft of the assigned level.
10.2.4A.2 Aircraft vacating a level. An aircraft cleared to leave a level is taken to have commenced its manoeuvre and vacated the previously occupied level when the pressure altitude-derived level information indicates a change of 400 ft or more in the anticipated direction from its previously assigned level.
10.2.4A.3 Aircraft passing a level in climb or descent. An aircraft in climb or descent is taken to have passed a level when the pressure altitude-derived level information indicates that it has passed this level in the required direction by 400 ft or more.
10.2.4A.4 Aircraft reaching a level. An aircraft is taken to have reached the level to which it has been cleared when the greater of 3 consecutive renewals of display updates or at least 15 seconds have passed since the pressure altitude-derived level information indicated that it was within ±200 ft of the assigned level.
10.2.5A Establishment of identification
10.2.5A.1 If SSR or PSR is used for identification, aircraft must be identified by at least 1 of the following procedures:
(a) application of 1 or more of the SSR or PSR identification procedures specified in PANS-ATM;
(b) correlating a particular radar position to the position of an aircraft observed visually.
10.2.5A.2 If ADS-B is used for identification, aircraft must be identified by at least 1 of the following procedures:
(a) direct recognition of the aircraft identification in an ADS-B label;
(b) transfer of ADS-B identification (see subsection 12.1.7);
(c) observation of compliance with an instruction to TRANSMIT ADS-B IDENT.
10.2.6A Position information
10.2.6A.1 ATC must tell the pilot of an aircraft provided with ATS surveillance service of its position in the following circumstances:
(a) on identification, unless the identification is established:
(i) based on the pilot’s report of the aircraft position, or within 1 NM of the runway on departure, if the observed position on the situation display is consistent with the aircraft’s time of departure; or
(ii) by use of ADS-B aircraft identification, SSR Mode S aircraft identification or assigned discrete SSR codes if the location of the observed position indication is consistent with the current flight plan of the aircraft; or
(iii) by transfer of identification (see subsection 12.1.7);
(b) when the pilot requests this information;
(c) when the pilot’s estimate differs significantly from the controller’s estimate based on the observed position;
(d) when the pilot is instructed to resume own navigation after vectoring if the current instructions had diverted the aircraft from a previously assigned route;
(e) immediately before termination of ATS surveillance service, if the aircraft is observed to deviate from its intended route.
[5] Subsection 10.2.3
substitute
10.2.3 Termination of ATS surveillance services
10.2.3.1 When an aircraft exits controlled airspace into an area in which ATS surveillance services will continue, ATC must inform the pilot accordingly.
[6] Subsections 10.2.4, 10.2.5 and 10.2.6
substitute
10.2.4 Obstacle clearance
10.2.4.1 When vectoring, ATC must provide at least 1 000 ft vertical clearance over any obstacle within:
(a) 3 NM of the aircraft when the range scale in not greater than 50 NM; or
(b) 5 NM of the aircraft when the range scale is greater than 50 NM.
10.2.4.2 These obstacle clearance requirements do not apply:
(a) when vectoring as part of an issued SID; or
(b) when ATC authorises a visual departure; or
(c) in VMC by day only, when ATC assigns responsibility for arranging obstacle clearance specifically to the pilot; or
(d) when conducting a Radar Cloud Break Procedure.
10.2.5 Vectoring special VFR
10.2.5.1 Special VFR aircraft may be vectored only if warranted by emergency conditions.
10.2.6 Issuing ATS surveillance system derived distance
10.2.6.1 ATS surveillance system derived distance and appropriate altitude assignments may be issued to an arriving aircraft using a track for which a DME or GPS Arrival procedure is specified, if:
(a) DME is not available; or
(b) a pilot conducting a GPS arrival reports the loss of RAIM.
10.2.6.2 When ATS surveillance system derived distances are used as a substitute for DME or GPS derived distance information, the reference datum being used for the distance information (e.g. DME site) must be displayed on the situation display map.
[7] Subsection 10.4.1.2
substitute
10.4.1.2 When a delay of more than 5 minutes is expected, ATC must issue pilots:
(a) when a procedural control service is provided with an expected approach time (EAT); or
(b) when an ATS surveillance service is provided with an expected landing time (ETL).
[8] Subsection 10.5.4.3
omit
radar
[9] Subsection 10.5.4.4
substitute
10.5.4.4 If an airspace boundary in ATS surveillance system coverage divides 2 sectors, aircraft must not be vectored closer than half the applicable ATS surveillance system horizontal separation minimum from the displayed system map boundary. However, the reduction to half the applicable ATS surveillance system horizontal separation may only be used if:
(a) the adjacent sector, in controlled airspace, has the same ATS surveillance system processing and display system; or
(b) the restricted area flying activity is subject to the ADF:
(i) applying half the applicable ATS surveillance system horizontal separation minimum between aircraft in the restricted area and the restricted area boundary; or
(ii) ensuring that an appropriate navigation tolerance is applied to aircraft operating in the restricted area (i.e. that the aircraft are contained within the restricted area); or
(c) the restricted area non-flying activity is subject to the appropriate tolerances being applied by the restricted area user to ensure containment of the activity within the restricted area.
[10] Subsection 10.5.4.5
substitute
10.5.4.5 If different ATS surveillance system separation minima apply on either side of a boundary, aircraft must not be vectored closer to the boundary than half the larger of the 2 minima.
[11] Subsection 10.5.4.6
omit
radar standard
substitute
ATS surveillance system separation minimum
[12] Subsection 10.5.5, heading
substitute
10.5.5 Separation minima based on ATS surveillance systems
[13] Subparagraph 10.5.5.1 (b) (ii)
omit
displays;
insert
displays; and
[14] After paragraph 10.5.5.1 (b)
insert
(ba) aircraft position is derived only from radar information;
[15] Subsection 10.5.5.2
omit
radar separation minimum
insert
separation minimum based on radar or ADS-B information
[16] Subsection 10.5.5.4
substitute
10.5.5.4 Separation between aircraft leaving controlled airspace. ATS surveillance system separation may be applied between aircraft about to leave controlled airspace if:
(a) the horizontal separation is at least 5 NM; and
(b) mutual traffic information is passed to each aircraft before it leaves controlled airspace.
[17] Subsection 10.5.5.5
substitute
10.5.5.5 Separation between aircraft within and outside of coverage. Separation continues to exist between aircraft when 1 of the aircraft has passed out of ATS surveillance coverage if:
(a) when proceeding on the same track — ATS surveillance system separation existed when the leading aircraft passed out of range and procedural separation is established before the following aircraft arrives within 5 NM of the last observed position of the leading aircraft; or
(b) when proceeding on reciprocal tracks — the aircraft in ATS surveillance system coverage has passed the last observed position of the outbound aircraft by the applicable ATS surveillance system separation minimum.
[18] Subsection 10.5.5.6
substitute
10.5.5.6 ATS surveillance system separation may be provided between an aircraft under ATS surveillance system control and the procedural navigation tolerance appropriate to the clearance issued to an aircraft not under ATS surveillance system control:
(a) until the latter has been identified; and
(b) only if the procedural navigation tolerance is shown on the situation display.
[19] Table 10.6.4
omit each occurrence of
radar
insert
ATS surveillance system
[20] Table 10.6.4 Conditions
omit
Radar observation
insert
ATS surveillance system observation
[21] Table 10.6.4 Conditions
omit each occurrence of
5-minute
insert
5 min
[22] Table 10.6.4 Conditions
omit each occurrence of
One aircraft
insert
1 aircraft
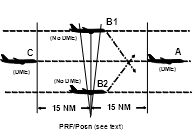
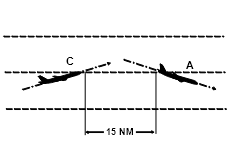
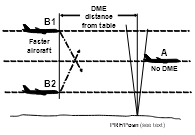
[23] Table 10.6.4 Diagram
omit each occurrence of
PRF/ATC Radar Posn
insert
PRF/Posn (see text)
[24] Subsection 10.6.7.9
substitute
10.6.7.9 When the ATS surveillance system derived distance between the aircraft is less than the sum of the distance required by the procedural separation minimum and the applicable ATS surveillance system separation minimum, a distance check must be made before the first aircraft leaves ATS surveillance system coverage.
[25] Subsection 10.6.7.10
substitute
10.6.7.10 Separation minima D4, D7 and R3 (change of level) may also be applied between 2 aircraft if:
(a) the aircraft are confirmed to be on opposite sides of an en-route navigation aid, and 1 aircraft’s distance is established by RNAV/DME to be not closer to that aid than the distance required by the separation minimum; or
(b) the distance determined by an ATS surveillance system, or by the position of 1 identified aircraft and an RNAV/DME report from the other, establishes that the distance between the aircraft is at least the distance required by the procedural separation minimum plus the applicable ATS surveillance system separation minimum; or
(c) 1 aircraft’s distance is established by RNAV/DME and the second aircraft’s position is established, by day, with reference to a visual fix, if:
(i) the fix is a prominent topographical feature within 10 000 ft of the aircraft; and
(ii) the feature is displayed on maps available to ATC.
[26] Subsection 10.6.10.2
substitute
10.6.10.2 Methods of determining longitudinal distance separation using ADS-C may include:
(a) the use of system tools to measure the distance between the displayed positions of 2 or more FANS-1/A aircraft reporting by ADS-C; or
(b) when both aircraft are within CTA — a comparison of the actual ADS-C report symbol of a FANS-1/A aircraft with the position of another aircraft determined by an alternative form of position fixing, such as radar, ADS-B, voice or CPDLC reports.
[27] Subsection 10.6.10.4
substitute
10.6.10.4 When 2 FANS-1/A aircraft reporting by ADS-C are flying on the same identical tracks (same or opposite direction), the measurements may be taken directly between the 2 ADS-C symbols.